Unit 2.3: Elementary Signals#
The preparatory reading for this section is Chapter 1 of [Karris, 2012] which
begins with a discussion of the elementary signals that may be applied to electrical circuits
introduces the unit step, unit ramp and dirac delta functions
presents the sampling and sifting properties of the delta function and
concludes with examples of how other useful signals can be synthesised from these elementary signals.
Additional information has been adapted from Section 1.4 of [Hsu, 2020].
Follow along at cpjobling.github.io/eg-150-textbook/signals_and_systems/elementary_signals
Introduction#
Consider the network shown in below where the switch is closed at time \(t=T\) and all components are ideal.
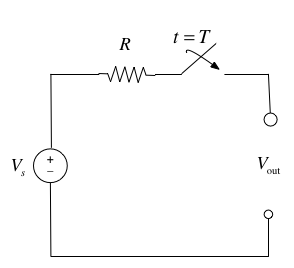
Express the output voltage \(V_{\mathrm{out}}\) as a function of the unit step function, and sketch the appropriate waveform.
Slido poll 1#
Solution
Before the switch is closed at \(t < T\):
After the switch is closed for \(t > T\):
We imagine that the voltage jumps instantaneously from 0 to \(V_s\) volts at \(t = T\) seconds as shown below.
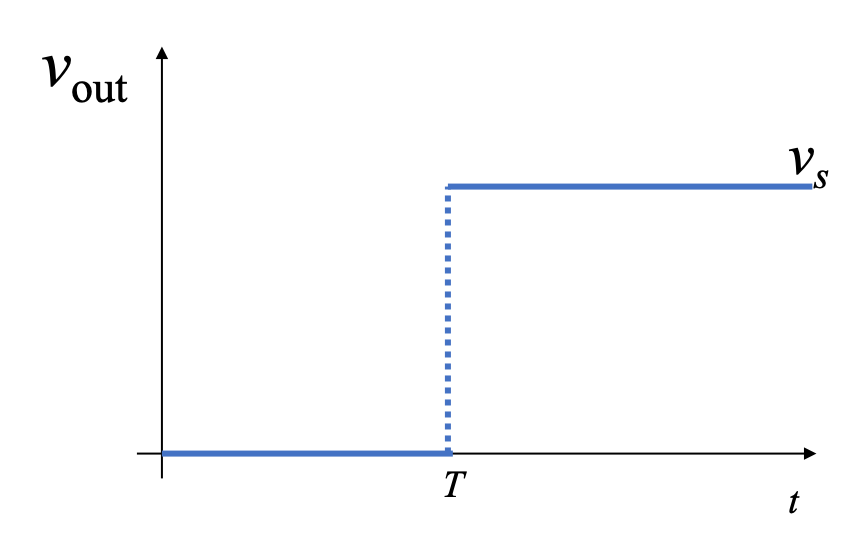
We call this type of signal a step function.
What is happening at \(t=0\)?
Mathematically, the value of the signal at \(t=0\) is undefined and the time derivative is infinite. In practice, we could imagine that the signal will be somewhere on the dotted line. But, we don’t know where.
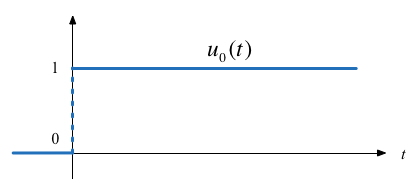
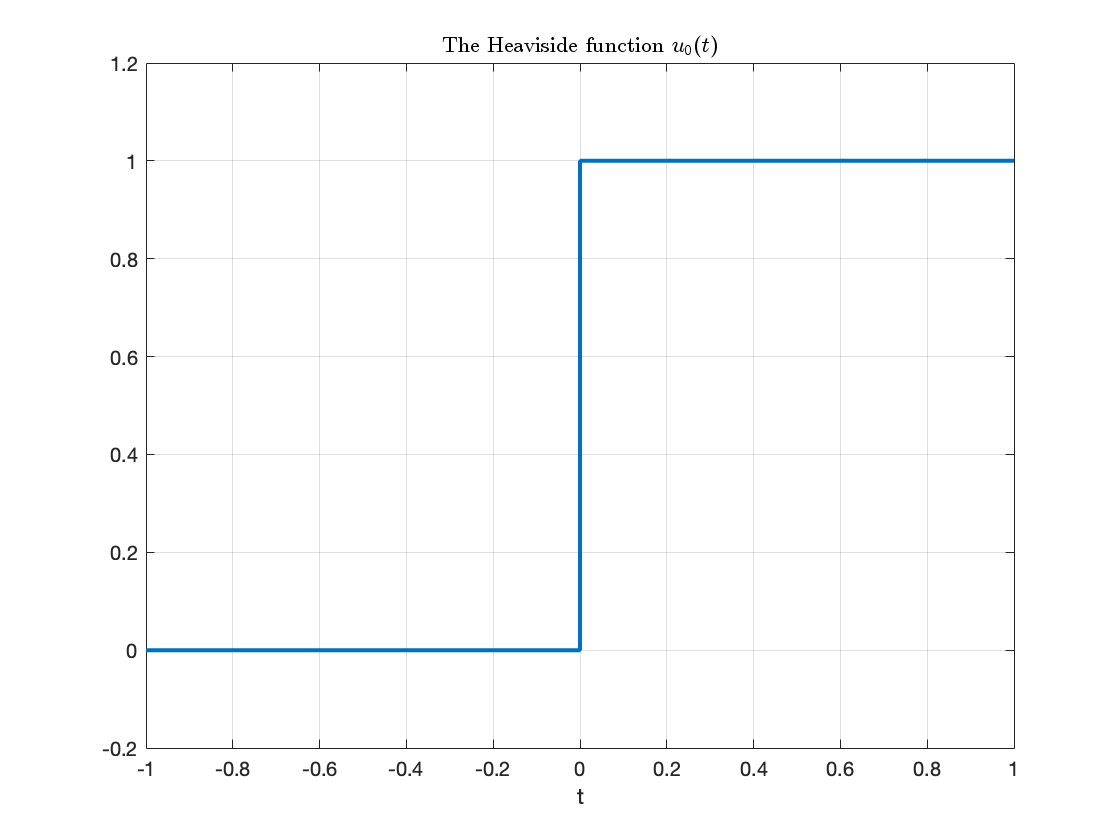
The Unit Step Function#
In MATLAB#
In MATLAB, we use the heaviside function (named after Oliver Heaviside) to model the unit step signal.
cd('/Users/eechris/code/src/github.com/cpjobling/eg-150-textbook/signals_and_systems/elementary_signals')
edit plot_heaviside
plot_heaviside
ans = 1
Note that, so that it can be plotted, MATLAB defines the Heaviside function slightly differently from the mathematically ideal unit step:
Simple Signal Operations#
Amplitude Scaling#
Sketch \(Au_0(t)\) and \(-Au_0(t)\)
syms t;
u0(t) = heaviside(t); % rename heaviside function for ease of use
A = 2; % so signal can be plotted
fplot(A*u0(t),[-1,1],'LineWidth',2),ylim([-0.2,2.2]),grid,title('Amplitude scaling $$Au_0(t)$$','interpreter','latex')
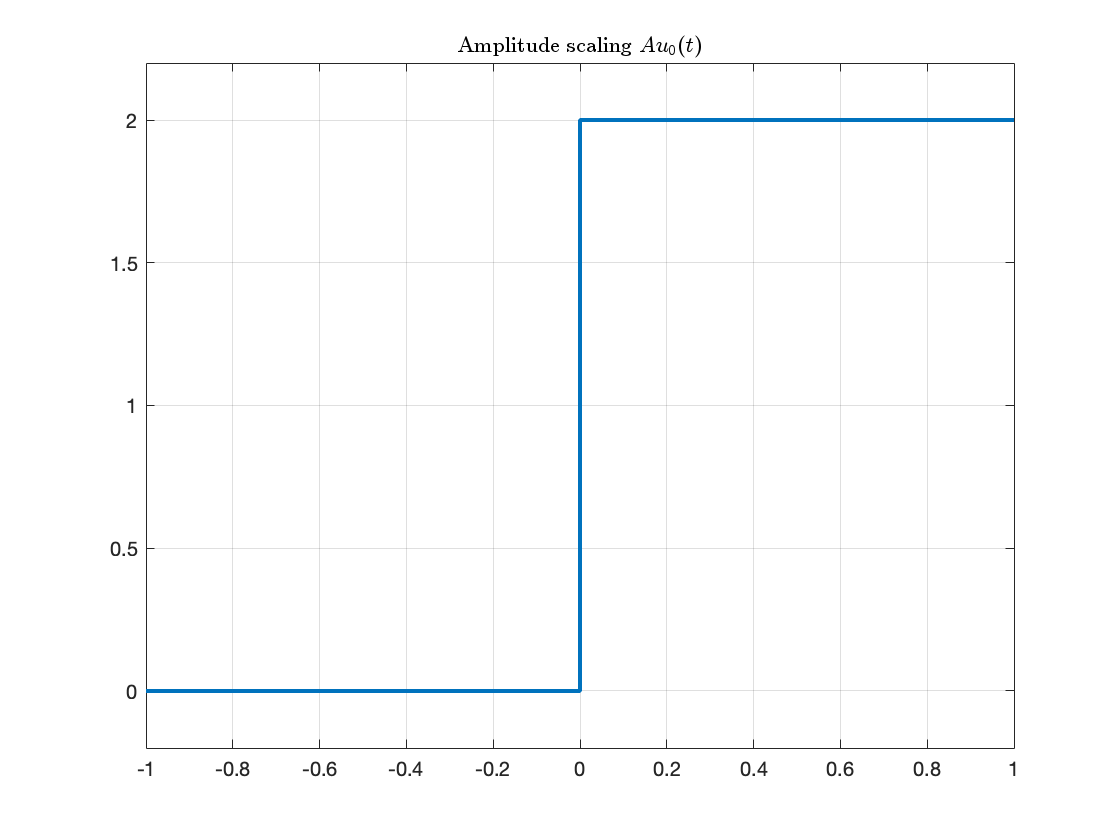
Note that the signal is scaled in the \(y\) direction.
fplot(-A*u0(t),[-1,1],'LineWidth',2),ylim([-2.2,0.2]),grid,...
title('Amplitude scaling and mirroring $$-Au_0(t)$$','interpreter','latex'),...
xlabel('t')
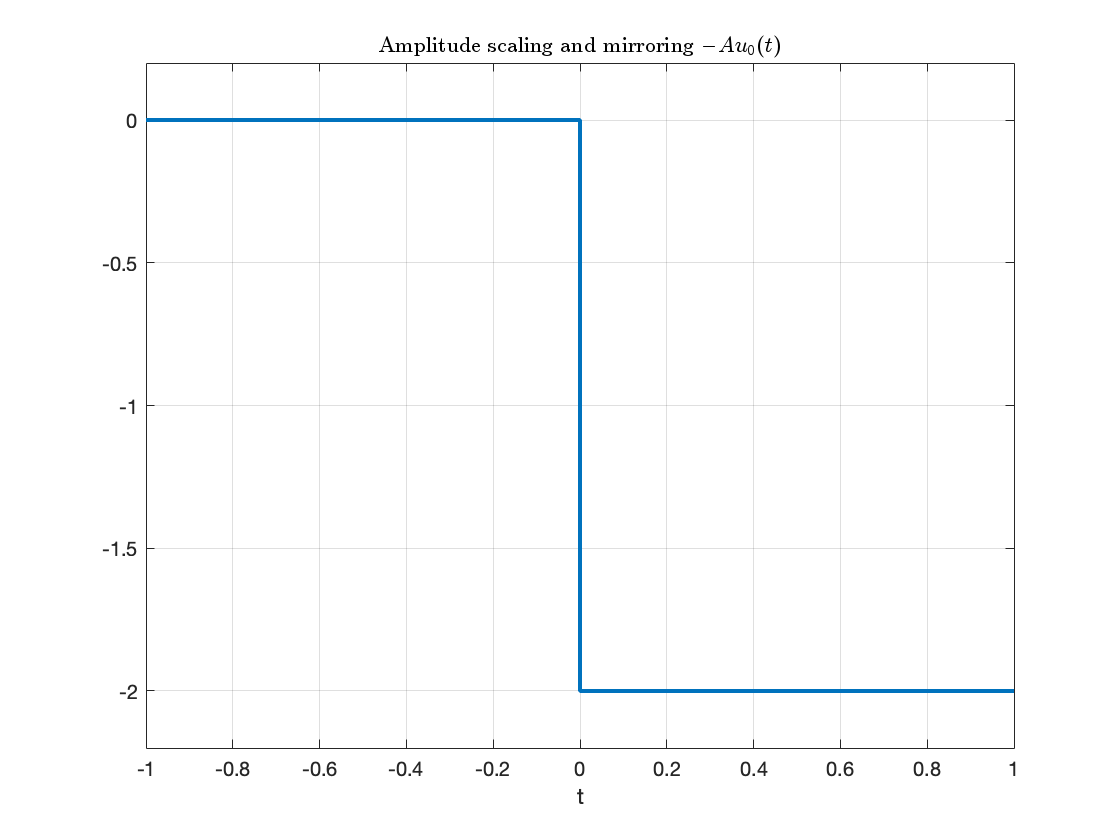
Note that, because of the sign, the signal is mirrored about the \(x\) axis as well as being scaled by 2.
Time Reversal#
Sketch \(u_0(-t)\)
fplot(A*u0(-t),[-1,1],'LineWidth',2),ylim([-0.2,2.2]),grid,title('Time reversal $$Au_0(-t)$$','interpreter','latex'),xlabel('t')
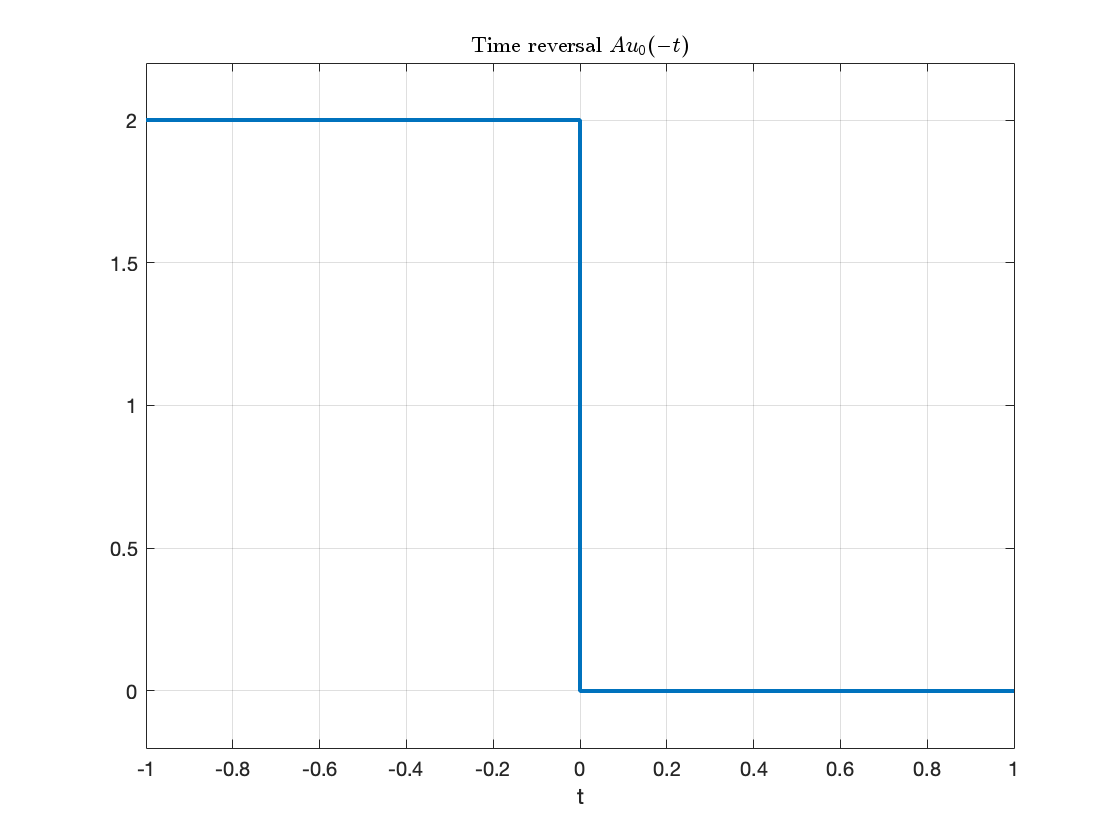
The sign on the function argument \(-t\) causes the whole signal to be reversed in time. Note that another way of looking at this is that the signal is mirrored about the \(y\) axis.
Time Delay and Advance#
Sketch \(u_0(t-T)\) and \(u_0(t+T)\)
T = 1; % again to make the signal plottable.
fplot(u0(t - T),[-1,2],'LineWidth',2),ylim([-0.2,1.2]),grid,title('Time delay $$u_0(t - T)$$','interpreter','latex'),xlabel('t')
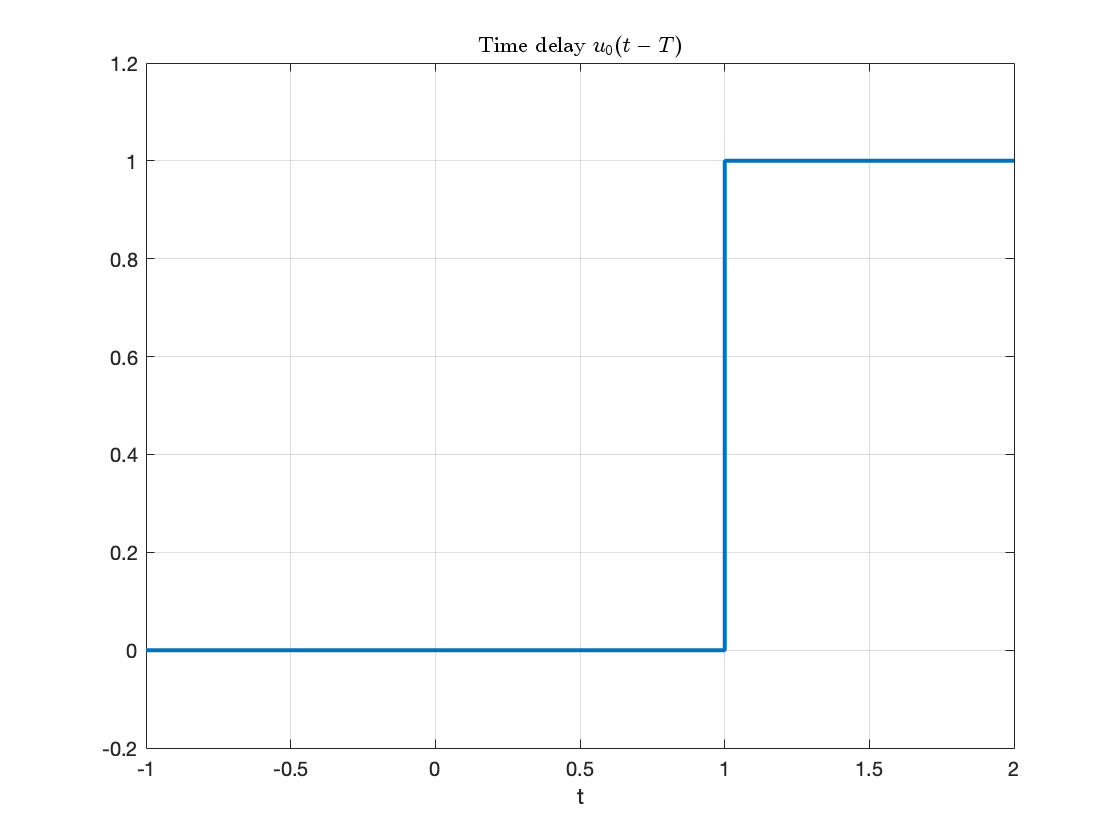
This is a time delay … note for \(u_0(t - T)\) the step change occurs T seconds later than it does for \(u_o(t)\).
fplot(u0(t + T),[-2,1],'LineWidth',2),ylim([-0.2,1.2]),grid,title('Time advance $$u_0(t + T)$$','interpreter','latex'),xlabel('t')
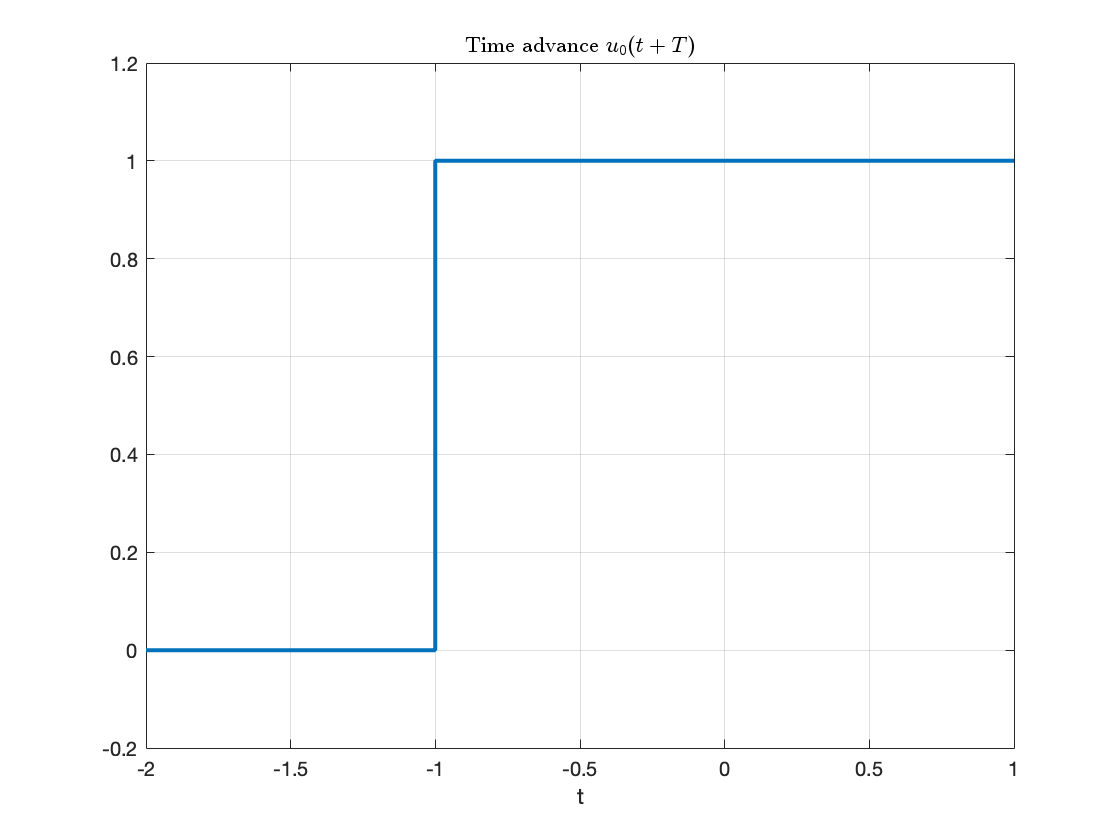
This is a time advance … note for \(u_0(t + T)\) the step change occurs T seconds earlier than it does for \(u_o(t)\).
Examples#
We will work through some examples in class. See Examples 3.
Synthesis of Signals from the Unit Step#
Unit step functions can be used to represent other time-varying functions such as rectangular pulses, square waves and triangular pulses. See Examples 3 for the examples that we will look at in class.
The Ramp Function#
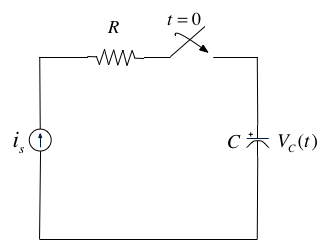
In the circuit shown above \(i_s\) is a constant current source and the switch is closed at time \(t=0\).
When the current through the capacitor \(i_c(t) = i_s\) is a constant and the voltage across the capacitor is
where \(\tau\) is a dummy variable.
Since the switch closes at \(t=0\), we can express the current \(i_c(t)\) as
and if \(v_c(t) = 0\) for \(t < 0\) we have
So, the voltage across the capacitor can be represented as
Note that in this as in other examples throughout these notes, and in published tables of transforms, the inclusion of \(u_0(t)\) in \(v_c(t)\) acts as a “gating function” that limits the definition of the signal to the causal range \(0 \le t \lt \infty\).
To sketch the wave form, let’s arbitrarily let \(C\) and \(i_s\) be one and then plot with MATLAB.
C = 1; is = 1;
vc(t)=(is/C)*t*u0(t);
fplot(vc(t),[-1,4],'LineWidth',2),grid,title('A ramp function'),xlabel('t')
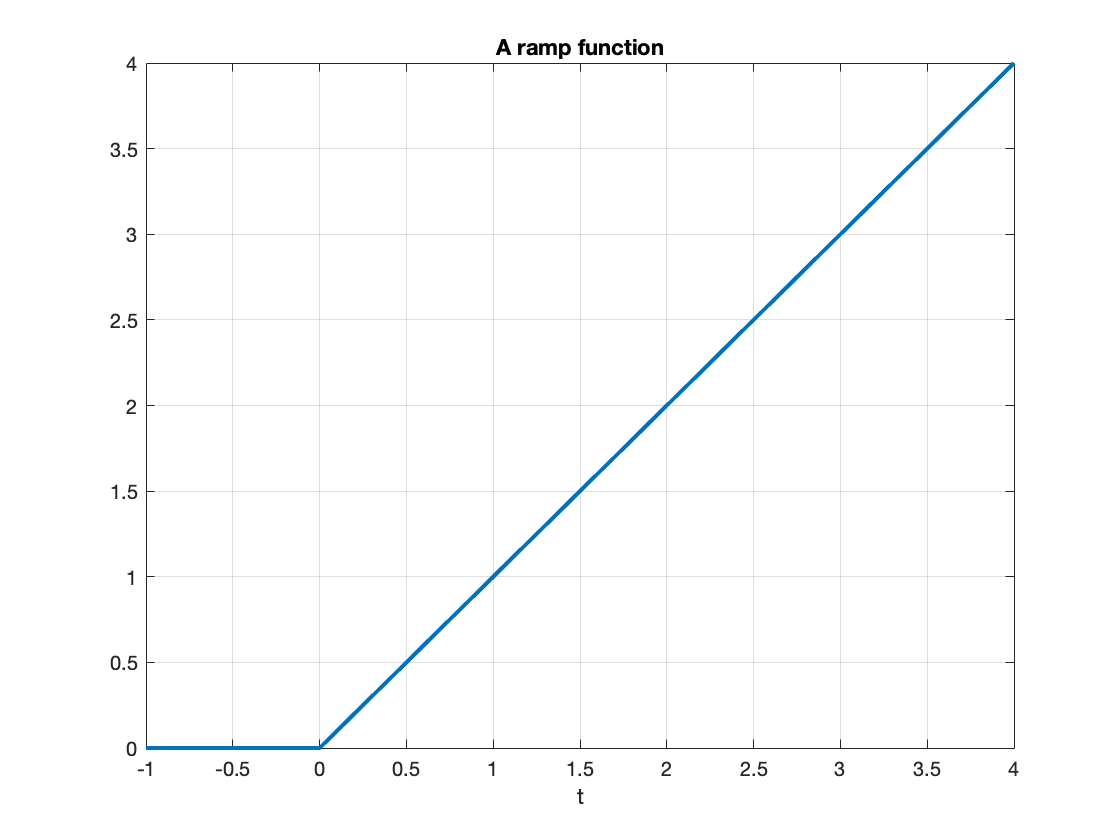
This type of signal is called a ramp function. Note that it is the integral of the step function (the resistor-capacitor circuit implements a simple integrator circuit).
The unit ramp function is defined as
so
and
Note
Higher order functions of \(t\) can be generated by the repeated integration of the unit step function.
For future reference, you should determine \(u_2(t)\), \(u_3(t)\) and \(u_n(t)\) for yourself and make a note of the general rule:
Details are given in equations 1.26—1.29 in [Karris, 2012].
The Dirac Delta Function#
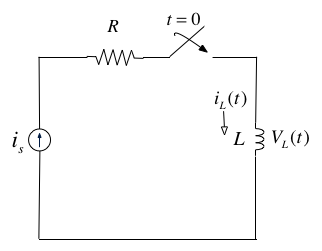
In the circuit shown above, the switch is closed at time \(t=0\) and \(i_L(t)=0\) for \(t<0\). Express the inductor current \(i_L(t)\) in terms of the unit step function and hence derive an expression for \(v_L(t)\).
Solution
Because the switch closes instantaneously at \(t=0\)
Thus
The unit Impulse Function#
The unit impulse function \(\delta(t)\), is the derivative of the unit step.
which is tricky to compute because \(u_0(t)\) is discontinuous at \(t=0\) but it must have the properties
To solve this problem we need to invent a function that represents the derivative of the unit step function. This function is called the unit impulse function 𝛿(𝑡), also known as the Dirac delta function (named after Paul Dirac).
Traditionally, \(\delta(t)\) is often defined as the limit of a suitably chosen conventional function having unity area over an infinitesimal time interval as shown in Fig. Fig. 21.
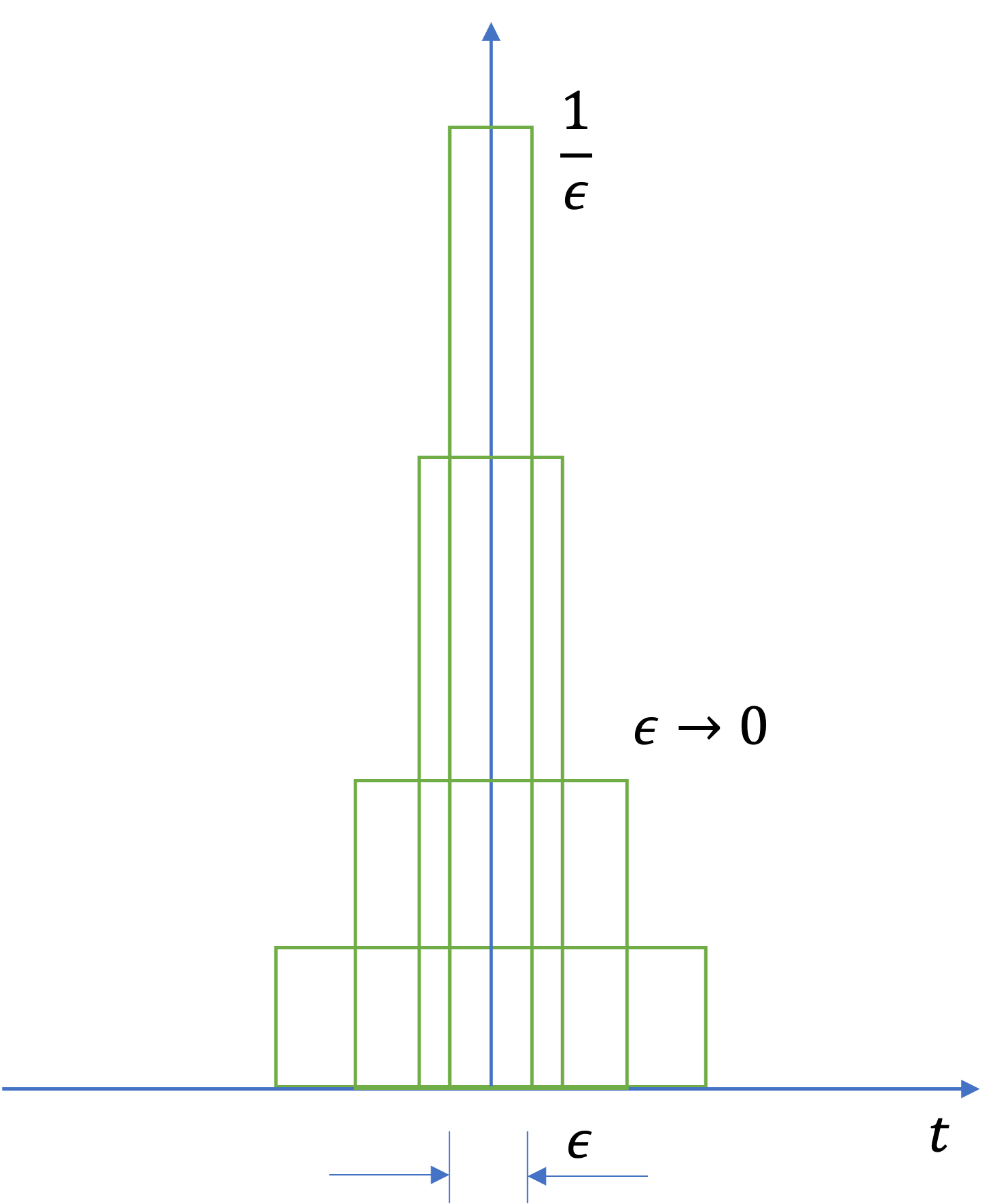
Fig. 21 Visualisation of the Dirac delta function as the limit of a conventional function with unit area.#
The Dirac delta posseses the following properties
The unit impulse function plays a fundamental role in systems analysis.
Sketch of the delta function#
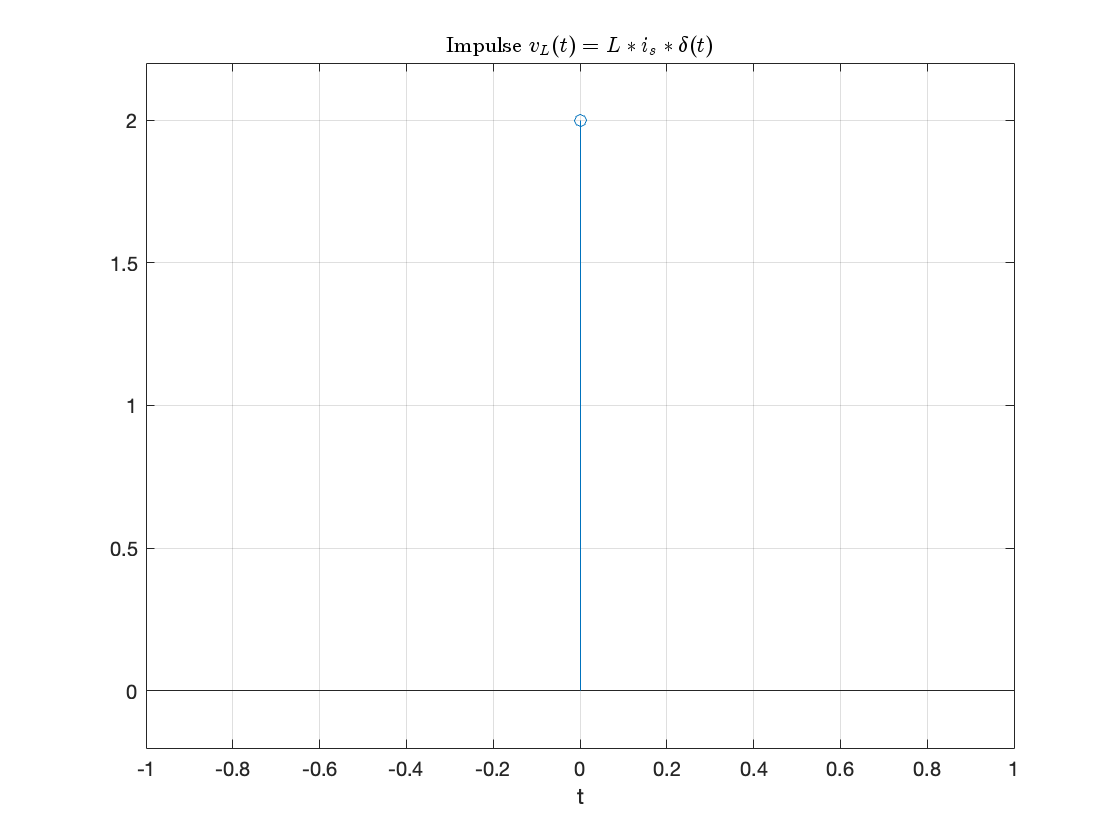
Continuing the example, and replacing the derivative of the unit step \(u_0(t)\) with the unit impulse \(\delta(t)\)

Note when we draw the unit impulse we show the height of \(\delta(t)\) as one so the height of the impulse in the figure is \(i_sL\).
MATLAB Confirmation#
syms is L;
vL(t) = is * L * diff(u0(t))
Note that we can’t plot dirac(t) in MATLAB with fplot. The best we can do is a stem plot.
L = 1; is = 2;
stem(0,L*is),ylim([-0.2,2.2]),title('Impulse $$v_L(t) = L*i_s*\delta(t)$$','interpreter','latex'),grid,xlabel('t')
Important properties of the delta function#
Sampling Property#
The sampling property of the delta function states that
or, when \(a = 0\),
Multiplication of any function \(f(t)\) by the delta function \(\delta(t)\) results in sampling the function at the time instants for which the delta function is not zero.
The study of descrete-time (sampled) systems is based on this property.
You should work through the proof for youself.
Sifting Property#
The sifting property of the delta function states that
That is, if multiply any function \(f(t)\) by \(\delta(t-\alpha)\), and integrate from \(-\infty\) to \(+\infty\), we will get the value of \(f(t)\) evaluated at \(t=\alpha.\)
You should also work through the proof for yourself.
Higher Order Delta Fuctions#
the nth-order delta function is defined as the nth derivative of \(u_0(t)\), that is
The function \(\delta'(t)\) is called the doublet, \(\delta''(t)\) is called the triplet and so on.
By a procedure similar to the derivation of the sampling property we can show that
Also, derivation of the sifting property can be extended to show that
Quiz and take aways#
Summary#
In this chapter we have looked at some elementary signals and the theoretical circuits that can be used to generate them.
Unit 2.3: Take aways#
You should note that the unit step is the heaviside function \(u_0(t)\).
Many useful signals can be synthesized by use of the unit step as a “gating function” in combination with other signals
That unit ramp function \(u_1(t)\) is the integral of the step function.
The Dirac delta function \(\delta(t)\) is the derivative of the unit step function. We sometimes refer to it as the unit impulse function.
The delta function has sampling and sifting properties that will be useful in the development of time convolution and sampling theory.
Exercises#
We will do some of these in class. See Examples 3.
References#
Hwei P. Hsu. Schaums outlines signals and systems. McGraw-Hill, New York, NY, 2020. ISBN 9780071634724. Available as an eBook. URL: https://www.accessengineeringlibrary.com/content/book/9781260454246.
Steven T. Karris. Signals and systems with MATLAB computing and Simulink modeling. Orchard Publishing, Fremont, CA., 2012. ISBN 9781934404232. Library call number: TK5102.9 K37 2012. URL: https://ebookcentral.proquest.com/lib/swansea-ebooks/reader.action?docID=3384197.