Unit 3.1: Response of a Continuous-Time LTI System and the Convolution Integral#
This section is based on Section 2.1 of [Hsu, 2020].
Follow along at cpjobling.github.io/eg-150-textbook/lti_systems/lti1
Subjects to be Covered#
A. Impulse Response#
The impulse response \(h(t)\) of a continuous-time LTI system (represented by \(\mathbf{T}\)) is defined as the response of the system when the input is \(\delta(t)\), that is,
B. Response to an Arbitrary Input#
From the Sifting Property
an arbitrary continuous-time input can be expressed in terms of the Dirac delta function as
Since the system is linear, the response \(y(t)\) of the system with arbitrary input \(x(t)\) can be expressed as
Since the system is time-invariant, we have
Substituting \(h(t-\tau)\) into the equation for \(y(t)\) gives
This equation indicates that a continuous-time LTI system is completely characterised by its impulse response \(h(t)\).
C. Convolution Integral#
The equation
defines the convolution of two continuous-time signals \(x(t)\) and \(h(t)\) denoted by
The equation
is commonly called the convolution integral.
Thus we have the fundamental result that:
the output of any continuous-time LTI system is the convolution of the input \(x(t)\) with the impulse response \(h(t)\) of the system.
Fig. 33 illustrates the definition of the impulse response \(h(t)\) and the convolution integral.
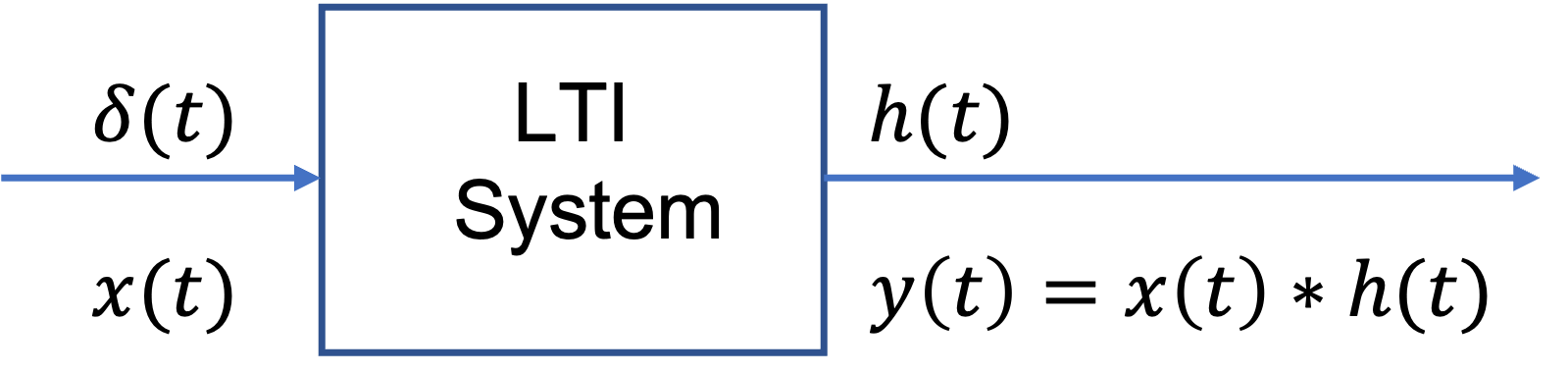
Fig. 33 Continuous-time LTI system#
D. Properties of the Convolution Integral#
The convolution integral has the following properties.
1. Commutative:#
2. Associative:#
3. Distributive:#
E. Convolution Integral Operation#
Applying the communitative propery of convolution to the convolution integral, we obtain
which may at times be easier to evaluate than
Graphical Evaluation of the Convolution Integral#
The convolution integral is most conveniently evaluated by a graphical evaluation. We give three examples (5.4—5.6) which we will demonstrate in class using a graphical visualization tool developed by Teja Muppirala of the Mathworks and updated by Rory Adams.
The tool: convolutiondemo.m (see license.txt).
We will then work through the examples again in the examples class.
cd /Users/eechris/code/src/github.com/cpjobling/eg-150-textbook/lti_systems/matlab/convolution_demo
pwd
ans = '/Users/eechris/code/src/github.com/cpjobling/eg-150-textbook/lti_systems/matlab/convolution_demo'
convolutiondemo % ignore warnings
Warning: The EraseMode property is no longer supported and will error in a future release.
Summary of Steps#
The inpulse response \(h(\tau)\) is time reversed (that is, reflected about the origin) to obtain \(h(-\tau)\) and then shifted by \(t\) to form \(h(t-\tau) = h\left[-(\tau - t)\right]\), which is a function of \(\tau\) with parameter \(t\).
The signal \(x(\tau)\) and \(h(t-\tau)\) are multiplied together for all values of \(\tau\) with \(t\) fixed at some value.
The product \(x(\tau)h(t-\tau)\) is integrated over all \(\tau\) to produce a single output value \(y(t)\).
Steps 1 to 3 are repeated as \(t\) varies over \(-\infty\) to \(\infty\) to produce the entire output \(y(t)\).
Examples of the above convolution integral operation are given in Examples 5.4 to 5.6.
Example#
We will do Exercise 5.4 in class
F. Step Response#
The step response \(s(t)\) of a continuous-time LTI system (represented by \(\mathbf{T}\)) is defined by the response of the system when the input is \(u_0(t)\); that is,
In many applications, the step response \(s(t)\) is also a useful characterisation of the system. The step response can be easily determined using the convolution integral; that is,
Thus the step response \(s(t)\) can be obtained by integrating the impulse response \(h(t)\).
Impulse response from step response#
Differentiating the step response with respect to \(t\), we get
Thus the impulse response \(h(t)\) can be determined by differentiating the step response \(s(t)\).
Exercises 5: Responses of a Continuous-Time LTI System and Convolution#
Exercise 5.1#
Verify the following properties of the convolution integral; that is,
(a) \(x(t)*h(t) = h(t)*x(t)\)
(b) \(\left\{x(t) * h_1(t)\right\} * h_2(t) = x(t)*\left\{h_1(t) * h_2(t)\right\}\)
For the answer, refer to the lecture recording or see solved problem 2.1 in in [Hsu, 2020].
Exercise 5.2#
Show that
(a) \(x(t) * \delta(t) = x(t)\)
(b) \(x(t) * \delta(t-t_0) = x(t - t_0)\)
(c) \(x(t)*u_0(t) = \int_{-\infty}^{t}x(\tau)\,d\tau\)
(d) \(x(t) * u_0(t - t_0) = \int_{-\infty}^{t_0}x(\tau)\,d\tau\)
For the answer, refer to the lecture recording or see solved problem 2.2 in in [Hsu, 2020].
Exercise 5.3#
Let \(y(t) = x(t) * h(t)\). Then show that
For the answer, refer to the lecture recording or see solved problem 2.3 in in [Hsu, 2020].
Exercise 5.4#
The input \(x(t)\) and the impulse response \(h(t)\) of a continuous-time LTI system are given by
(a) Compute the output \(y(t)\) by using the convolution integral
(b) Compute the output \(y(t)\) by using the convolution integral
Solutions#
(a) Graphical#
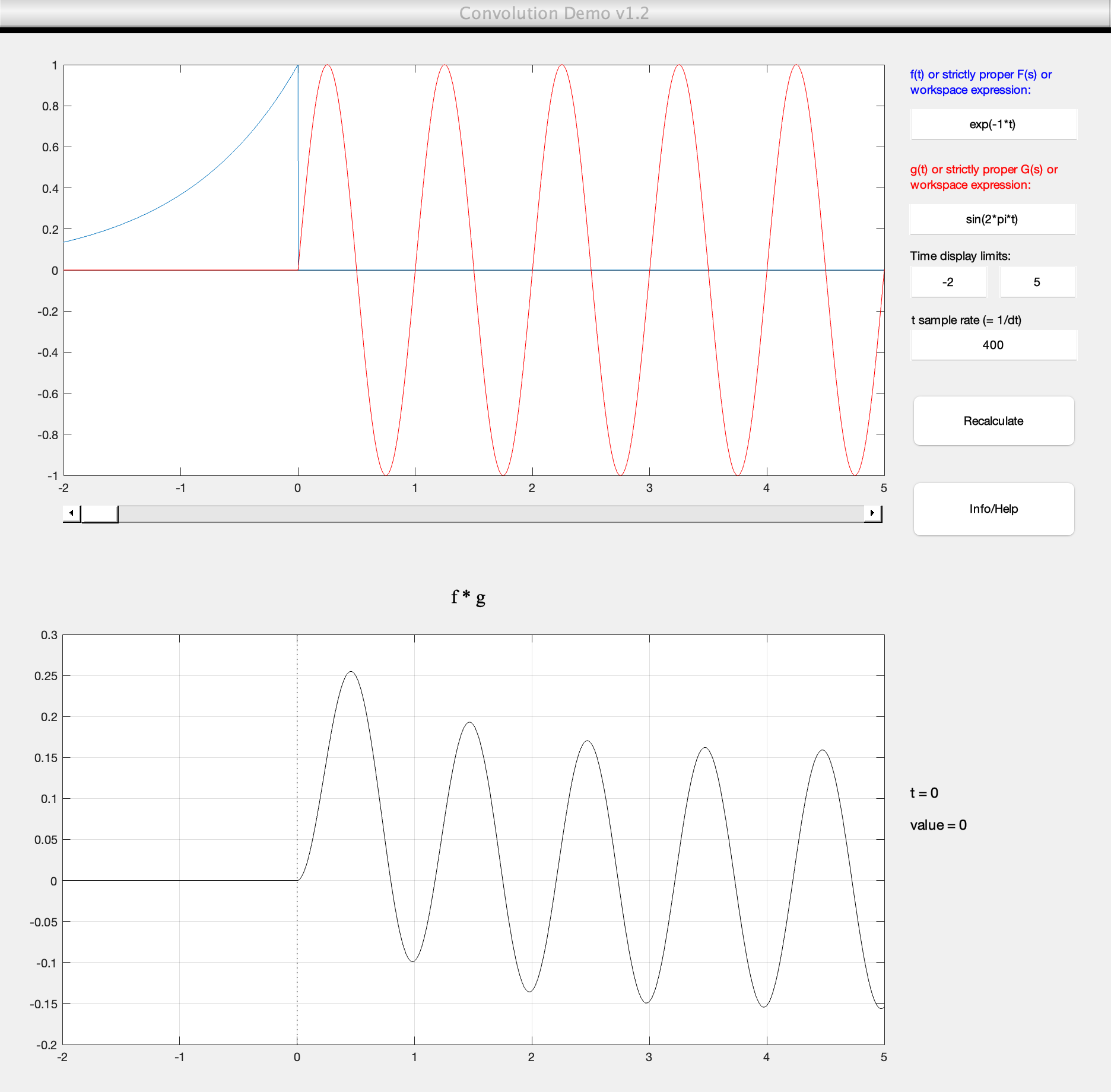
Using the convolutiondemo tool chose a value for \(\alpha\). I will use \(\alpha = 1\).
Then set f(t), which represents \(x(t)\), to heaviside(t) and g(t). which represents \(h(t)\) to exp(-1*t)
Manual solution#
For the manual solution, refer to the lecture recording or see solved problem 2.3 in in [Hsu, 2020].
MATLAB Solution#
We can also use the Symbolic Math Toolbox to solve the problem directly:
syms t tau alpha
assume(alpha > 0)
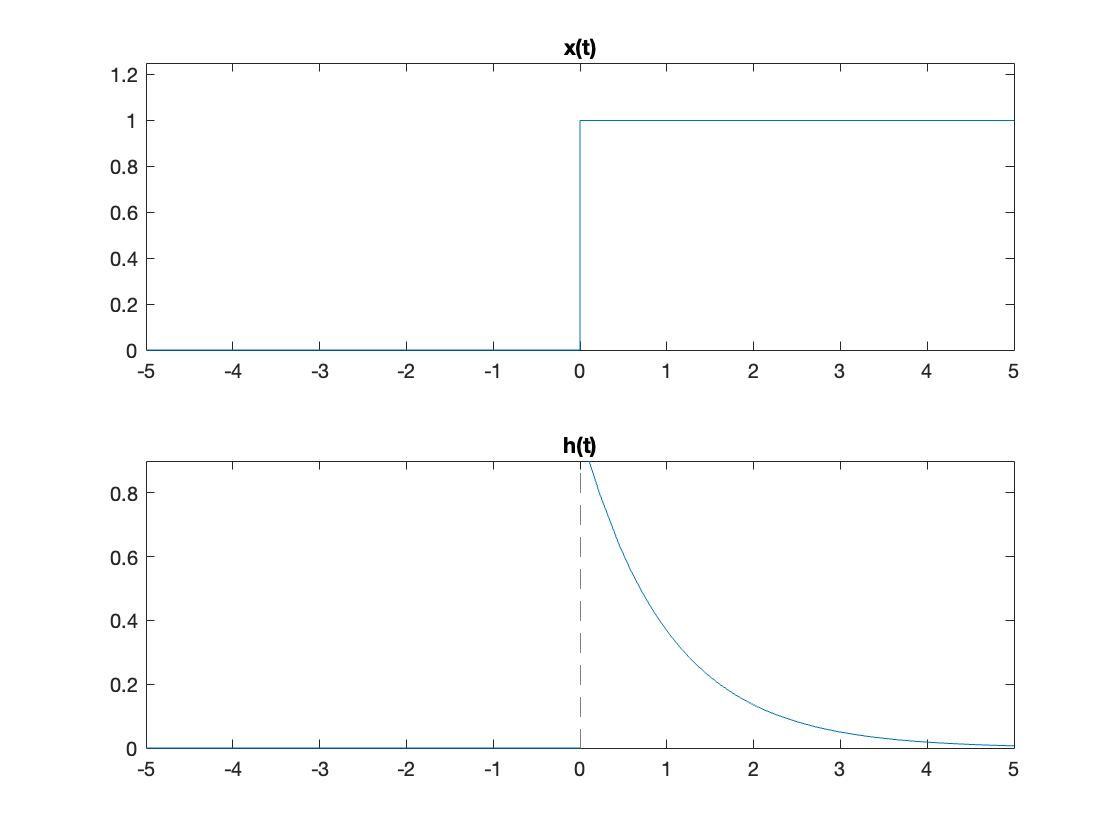
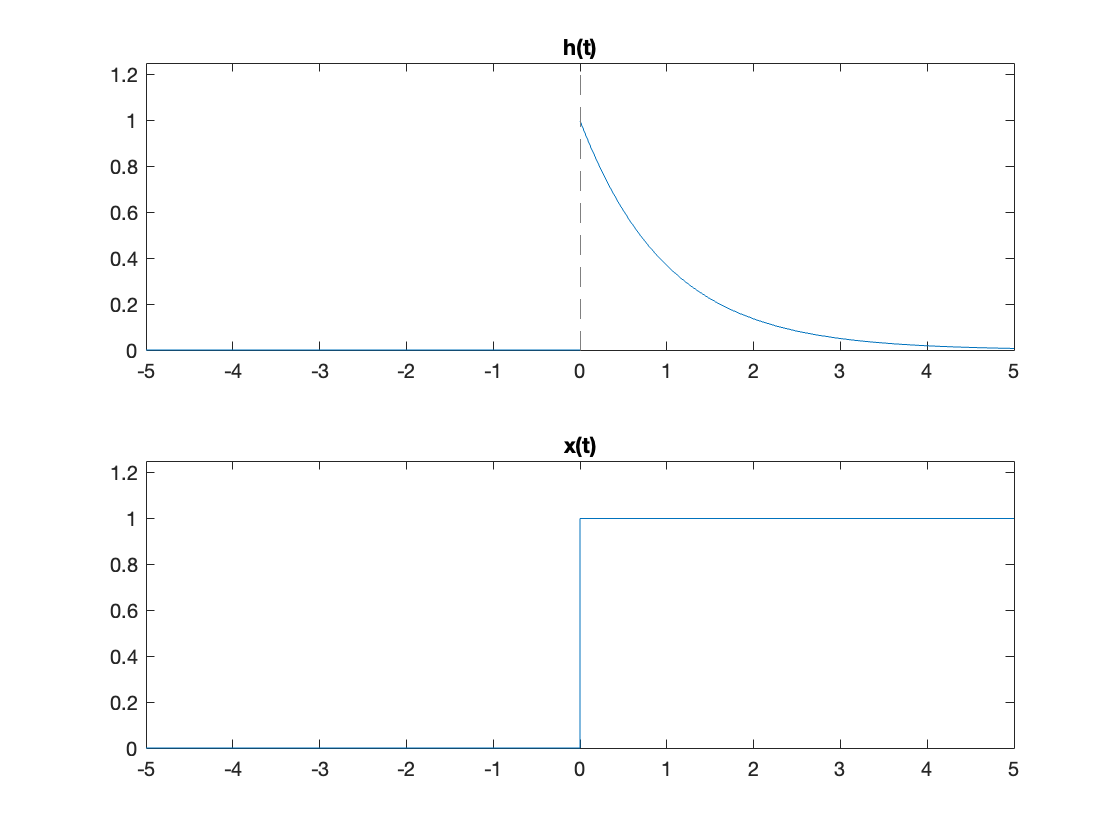
x(t) = heaviside(t); % unit step function
subplot(211)
fplot(x(t)),title('x(t)'),ylim([0,1.25])
h(t) = exp(-alpha*t)*heaviside(t);
subplot(212)
fplot(subs(h(t),alpha,1)),title('h(t)')
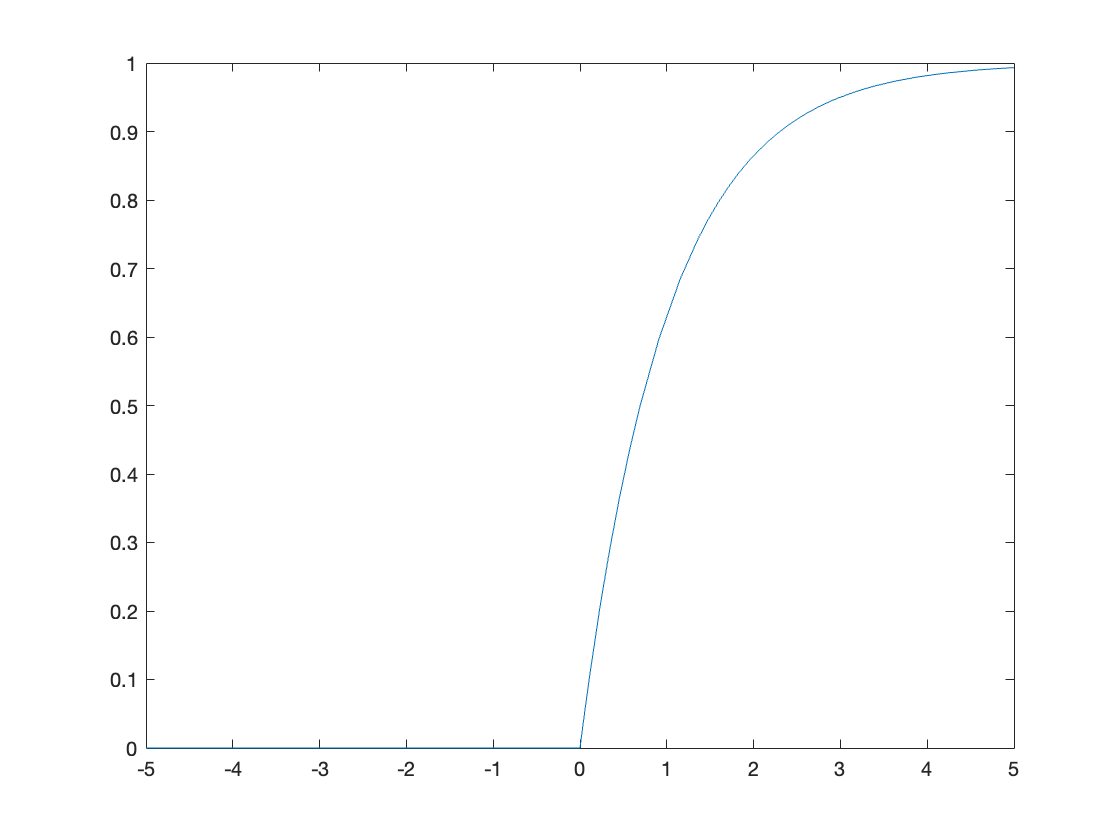
Compute \(y(t)\) using the MATLAB function int to compute the convolution integral symbolically.
y(t) = int(x(tau)*h(t - tau),tau,0,t)
Plot the result for \(\alpha = 1\)
clf
ya(t) = subs(y(t),alpha,1)
fplot(ya(t))
(b) Graphical#
Reverse the settings for f(t)and g(t) in the convolutiondemo tool.
Manual solution#
For the manual solution, refer to the lecture recording or see solved problem 2.3 in in [Hsu, 2020].
MATLAB Solution#
Reverse the arguments to the fplot and int functions.
subplot(211)
fplot(subs(h(t),alpha,1)),title('h(t)'),ylim([0,1.25])
subplot(212)
fplot(x(t)),title('x(t)'),ylim([0,1.25])
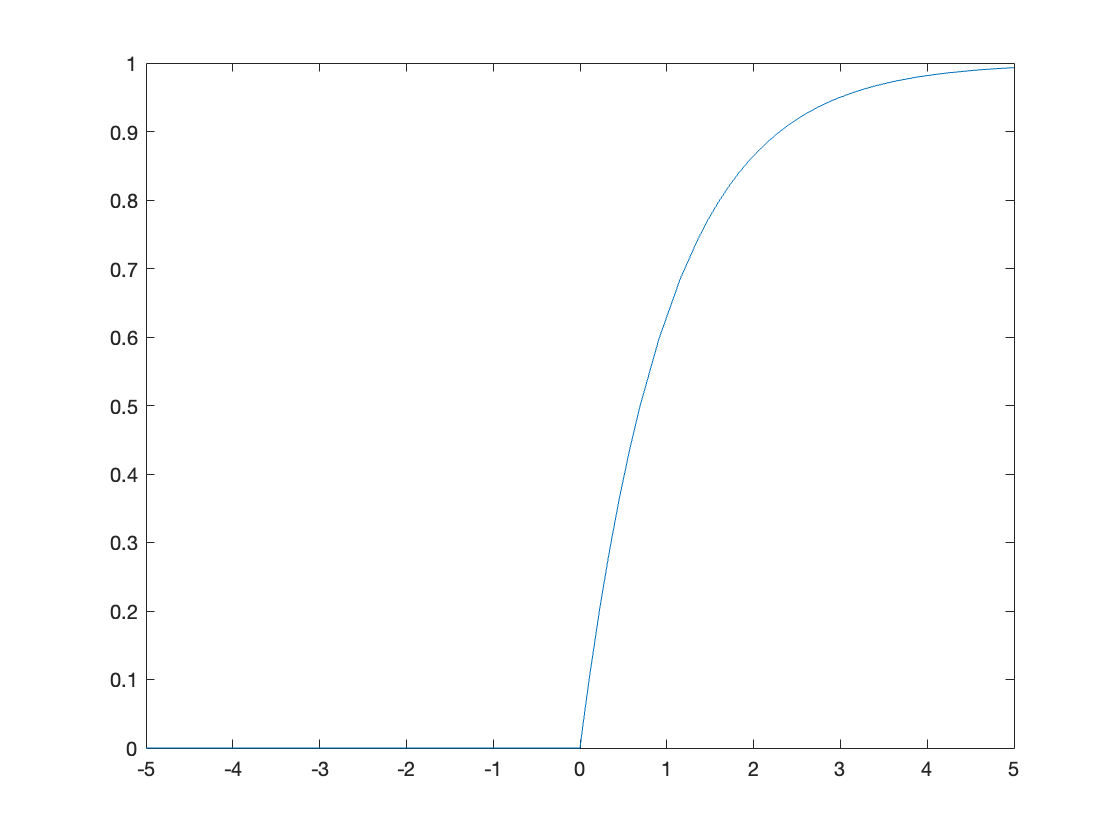
y(t) = int(h(tau)*x(t - tau),tau,-Inf,Inf)
Plot the result for \(\alpha = 1\)
clf
yb(t) = subs(y(t),alpha,1)
fplot(yb(t))
Go back to F. Step Response
Exercise 5.5#
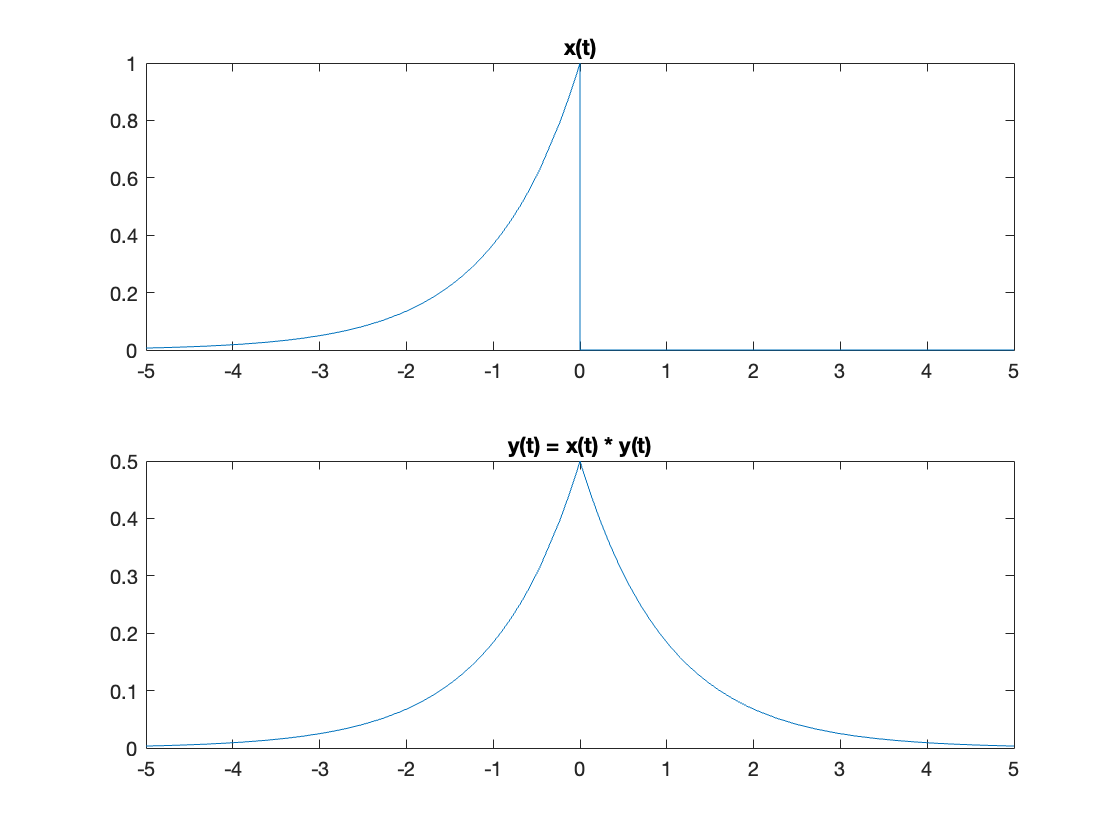
Compute the output \(y(t)\) for a continuous-time LTI system whose impulse response \(h(t)\) and the input \(x(t)\) are given by
Solutions#
Manual solution#
For the manual solution, refer to the lecture recording or see solved problem 2.3 in in [Hsu, 2020].
MATLAB Solution#
We can also use the Symbolic Math Toolbox to solve the problem directly:
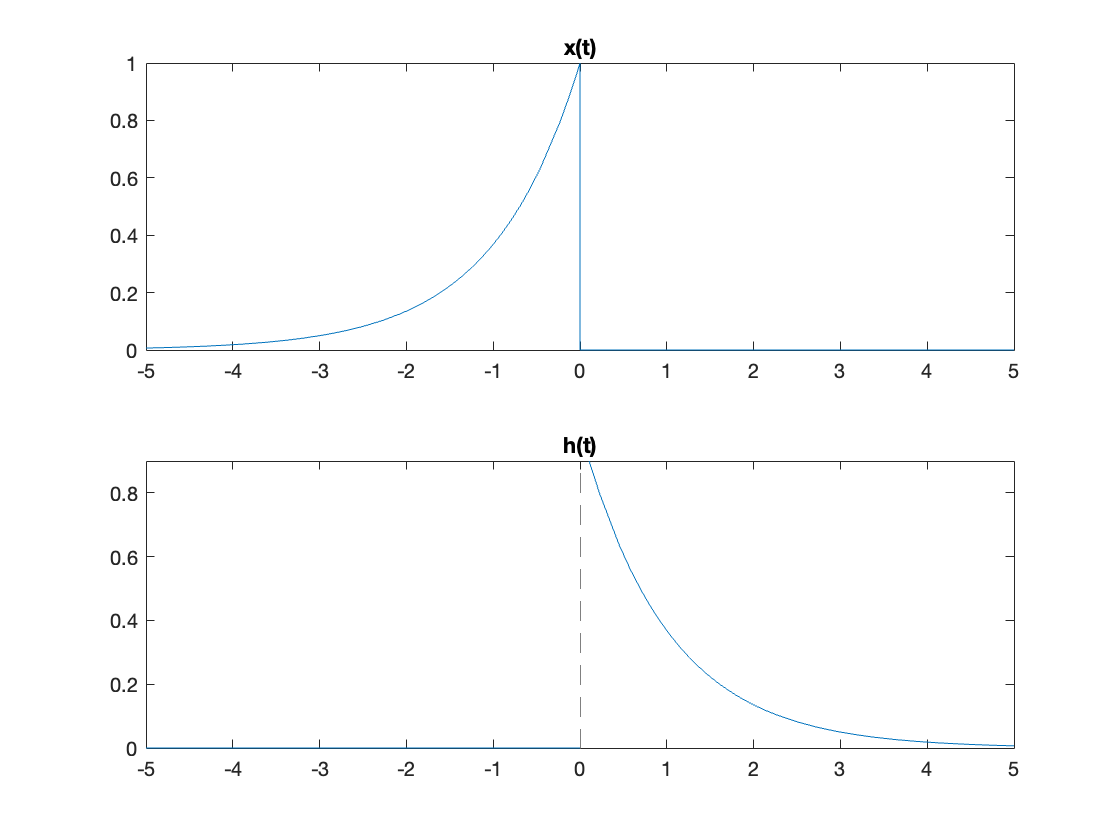
x(t) = exp(t)*heaviside(-t);
subplot(211)
fplot(x(t)),,title('x(t)')
h(t) = exp(-1*t)*heaviside(t);
subplot(212)
fplot(h(t)),title('h(t)')
Compute \(y(t)\) using the convolution integral
y(t) = int(x(tau)*h(t - tau),tau,-Inf,Inf)
Plot the result for \(\alpha = 1\)
fplot(y(t)),title('y(t) = x(t) * y(t)')
Exercise 5.6#
Evaluate \(y(t) = x(t) * h(t)\), where \(x(t)\) and \(h(t)\) are shown in Fig. 34, by an alalytical technique, and (b) by a graphical method.
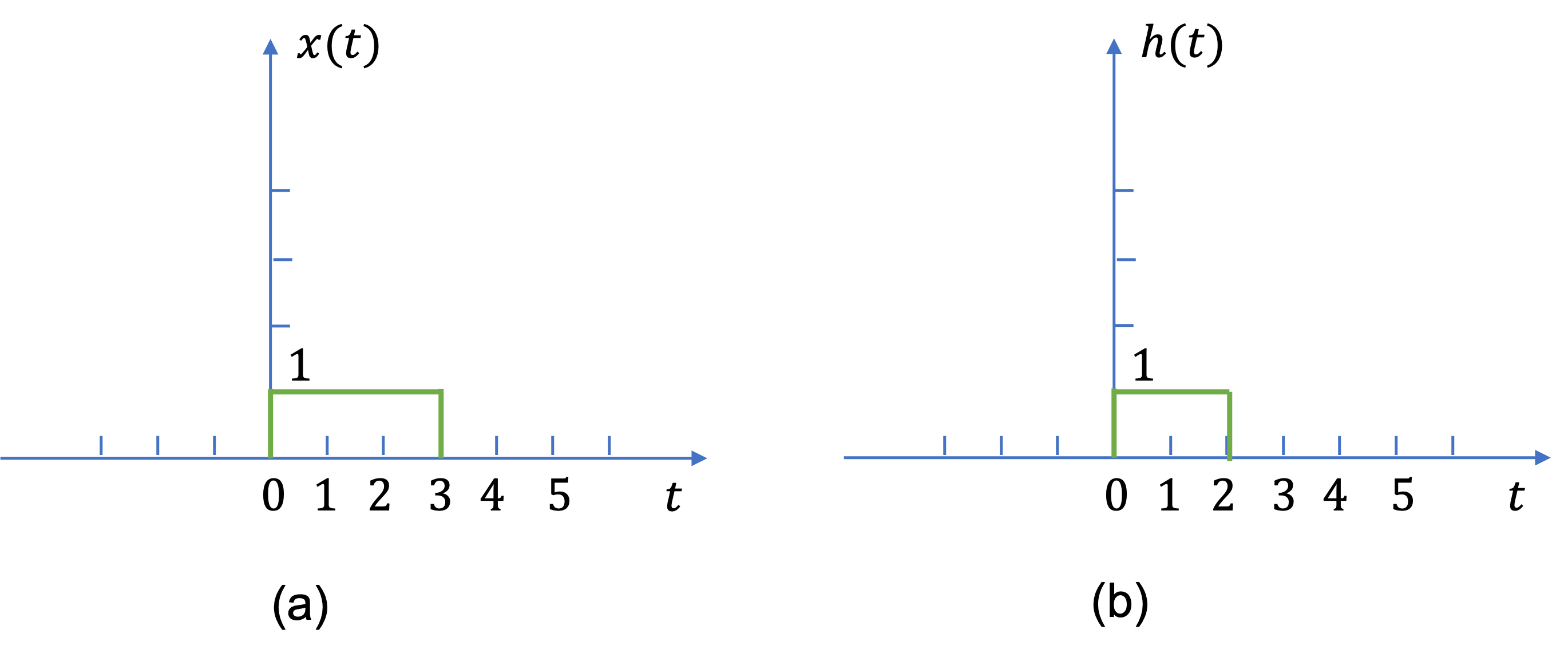
Fig. 34 Signal and system for example 5.6#
Solutions#
(a) Analytical#
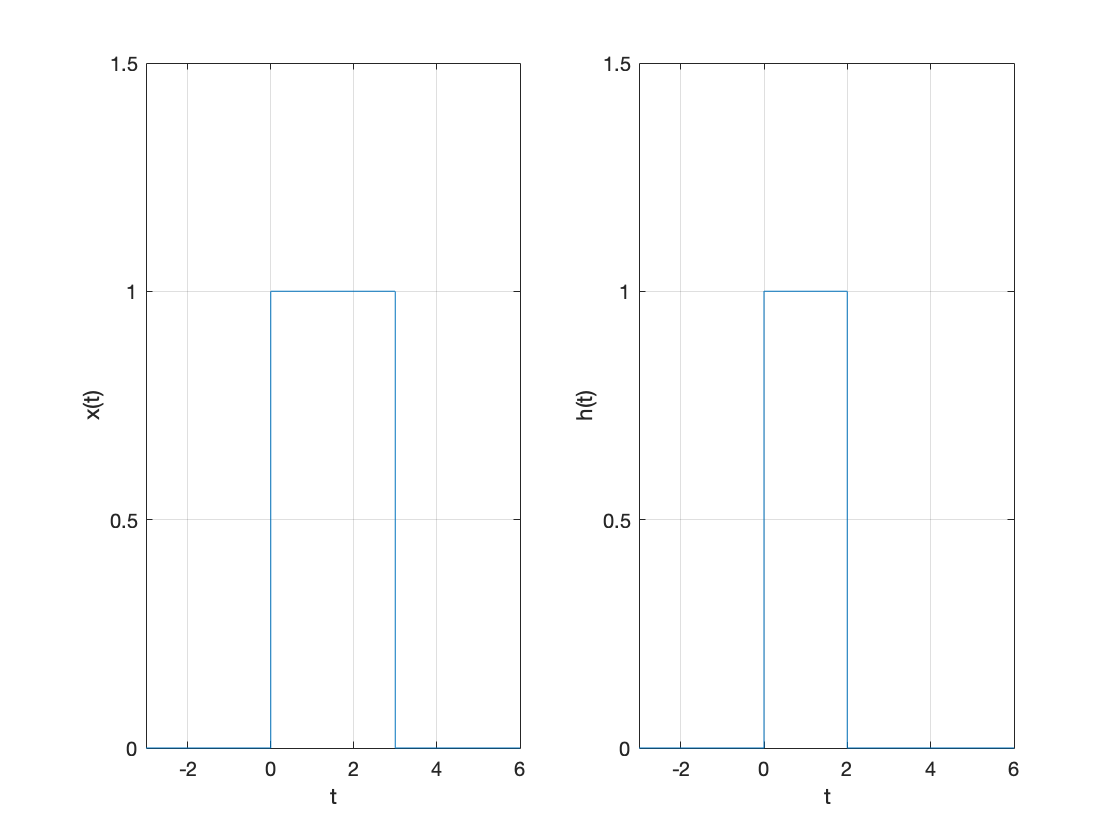
We first express \(x(t)\) and \(h(t)\) in functional form using the unit step (or Heaviside function)
We will use the MATLAB Symbolic Math Toolbox:
x(t) = heaviside(t)-heaviside(t-3);
h(t) = heaviside(t)-heaviside(t-2);
subplot(121)
fplot(x(t),[-3,6]),grid,ylim([0,1.5]),ylabel('x(t)'),xlabel('t')
subplot(122)
fplot(h(t),[-3,6]),grid,ylim([0,1.5]),ylabel('h(t)'),xlabel('t')
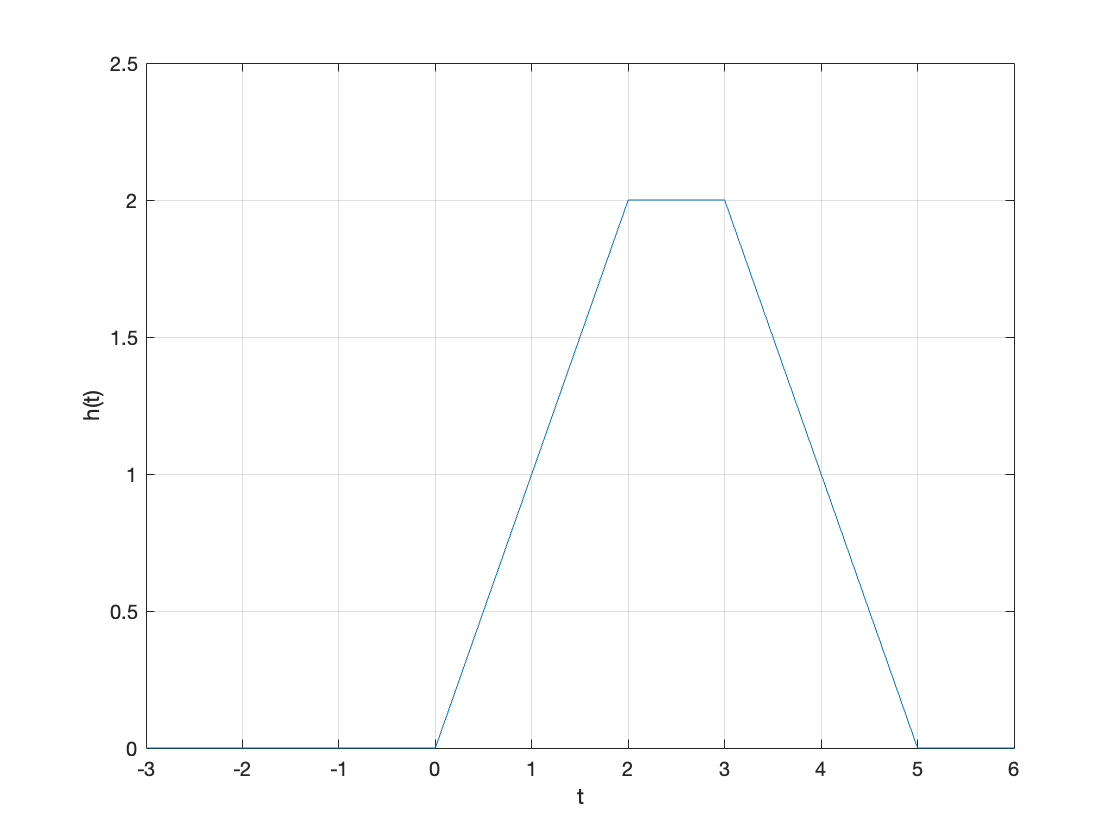
Compute \(y(t)\)
y(t) = int(x(tau)*h(t - tau),tau,-Inf,Inf)
Plot the result
clf
fplot(y(t),[-3,6]),grid,ylim([0,2.5]),ylabel('h(t)'),xlabel('t')
(b) Graphical#
Since both functions are unity between the limits set by the Heaviside function, graphical solution requires multiple applications of the definate integral
with different values for the limits \(t_0\) and \(t_1\). The convolutiondemo tool can help us discover the limits for the piecewise continuous signal \(y(t)\).
For the complete solution to Example 5.2 refer to the lecture recording or see solved problem 2.6 in in [Hsu, 2020].
Summary#
In this lecture we have looked at
Unit 3.1: Take Aways#
Impulse response: \(h(t) = \mathbf{T}\left\{\delta(t)\right\}\)
Step response: \(s(t) = \mathbf{T}\left\{u_0(t)\right\} = \int_0^t h(\tau)\,d\tau\)
Arbitrary system response: \(y(t) = \int_{-\infty}^{\infty} x(t)h(t-\tau)\,d\tau\)
Convolution itegral: \(y(t) = x(t)*h(t) = \int_{-\infty}^{\infty} x(t)h(t-\tau)\,d\tau = \int_{-\infty}^{\infty} x(t-\tau)h(\tau)\,d\tau\)
Properties of the convolution integral:
Communitative: \(x(t) * h(t) = h(t) * x(t)\)
Associative: \(\left\{x(t) * h_1(t) \right\} * h_2(t) = x(t)*\left\{h_1(t) * h_2(t) \right\}\)
Distributive: \(x(t)*\left\{h_1(t) + h_2(t)\right\} = x(t)*h_1(t) + x(t) * h_2(t)\)
The convolution integral can be computed graphically or analytically.
Next Time#
We continue our introduction to continuous-time LTI system by considering