Unit 7.2: Designing Digital Filters in MATLAB and Simulink#
You can view the notes for this presentation as a webpage (HTML).
Colophon#
The source code for this page is filters/1/filters.md.
You can view the notes for this presentation as a webpage (HTML).
This page is downloadable as a PDF file.
Scope and Background Reading#
Getting Started with Simulink for Signal Processing#
To provide some inspiration for the power of MATLAB and Simulink for the design of digital filters, we have included the following video from the MathWorks.
[The] video shows you an example of designing a signal processing system using Simulink®.
You start off with a blank Simulink model and design a signal processing algorithm to predict whether it is going to be sunny or cloudy in order to optimize power generated from a solar energy grid. The video walks you through analyzing sensor signals, designing filters and finally generating code for hardware deployment.
By the end of the video, you will learn the basics of Simulink and how Model-Based Design can be used to model, simulate, test and implement real-world signal processing systems.
In Unit 7.1: Designing Analogue Filters we looked at the MATLAB tools that can be used to design prototype analogue low-pass filters of various types, and introduced the MATLAB tools that design the prototypes and map them to high-pass, band-pass and band-stop filters. We also demostrated the tools needed to visualize the frequency response of such filters.
A the end of this process, we will have a transfer function \(H(s)\) that defines the poles and zeros of an analogue filter which we now need to digitize for implementation.
In this unit, we will introduce one way to convert and analogue filter \(H(s)\) into a digital filter \(H(z)\) which is known as the bilinear transformation. We will give an example of a digital filter design for a second-order analogue filter.
We will present the tools that MATLAB provides for the direct design of digital filters.
We will also look at the realization of such filters and give examples as Simulink block diagrams.
Finally we will present the Digital Filter Design block which allows the design of a filter directly in Simulink and supports the automatic generation of C-code or VHDL for digital filter design.
This unit is based on Sections 11.4-11.6 of [Karris, 2012].
At the end of this unit you should be able to use the bilinear transform to convert a 2nd-order analogue proptotype into a digital filter and provide the coefficients for a block-diagram or code implementation of such a filter.
To continue your learning we recommend that you visit the following pages on the MATLAB Documentation Platform:
Signal Processing [in MATLAB]
Signal Processing Toolbox - signal analysis, analogue and digital filter design
DSP System Toolbox - for designing and implementing digital filters in Simulink and for code generation.
Agenda#
format compact
cd matlab
Digital filters#
A digital filter is a computational process (algorithm) that converts one sequence of numbers \(x[n]\) representing the input, to another sequence \(y[n]\) that represents the output.
A digital filter can be used to filter out desired bands of frequency.
Digital filters can also be used to perform other functions, such as integration, differentiation, and estimation.
The input-output difference equation that relates the output and input can be expressed in the discrete-time (DT) domain as a summation of the form
or, as a Z-transform as
Therefore, the design of a digital filter to perform a desired function, entails the determination of the coefficients \(b_i\) and \(a_i\).
Classification of digital filters#
Digital filters are classified in terms of the duration of the impulse response, and in terms of realization.
1. Impulse response duration#
a). An infinite impulse response (IIR) filter as an infinite number of samples in its impulse response \(h[n]\).
b). A finite impulse response (FIR) filter as a finite number of samples in its impulse response \(h[n]\).
2. Realization#
a). In a recursive realization digital filter, the output depends on the input and the previous values of the output. In a recursive digital filter, both the coefficients \(b_i\) and \(a_i\) are present.
b). In a non-recursive realization digital filter, the output depends on present and past values of the input only. In a non-recursive digital filter, only the coefficients \(b_i\) are present, i.e. \(a_i=0\).
Implementation of digital filters#
Recursive realization#
Fig. 15 shows a Simulink model of a third-order (3-delay element or 3-tap) recursive realization of a digital filter[1]
recursive
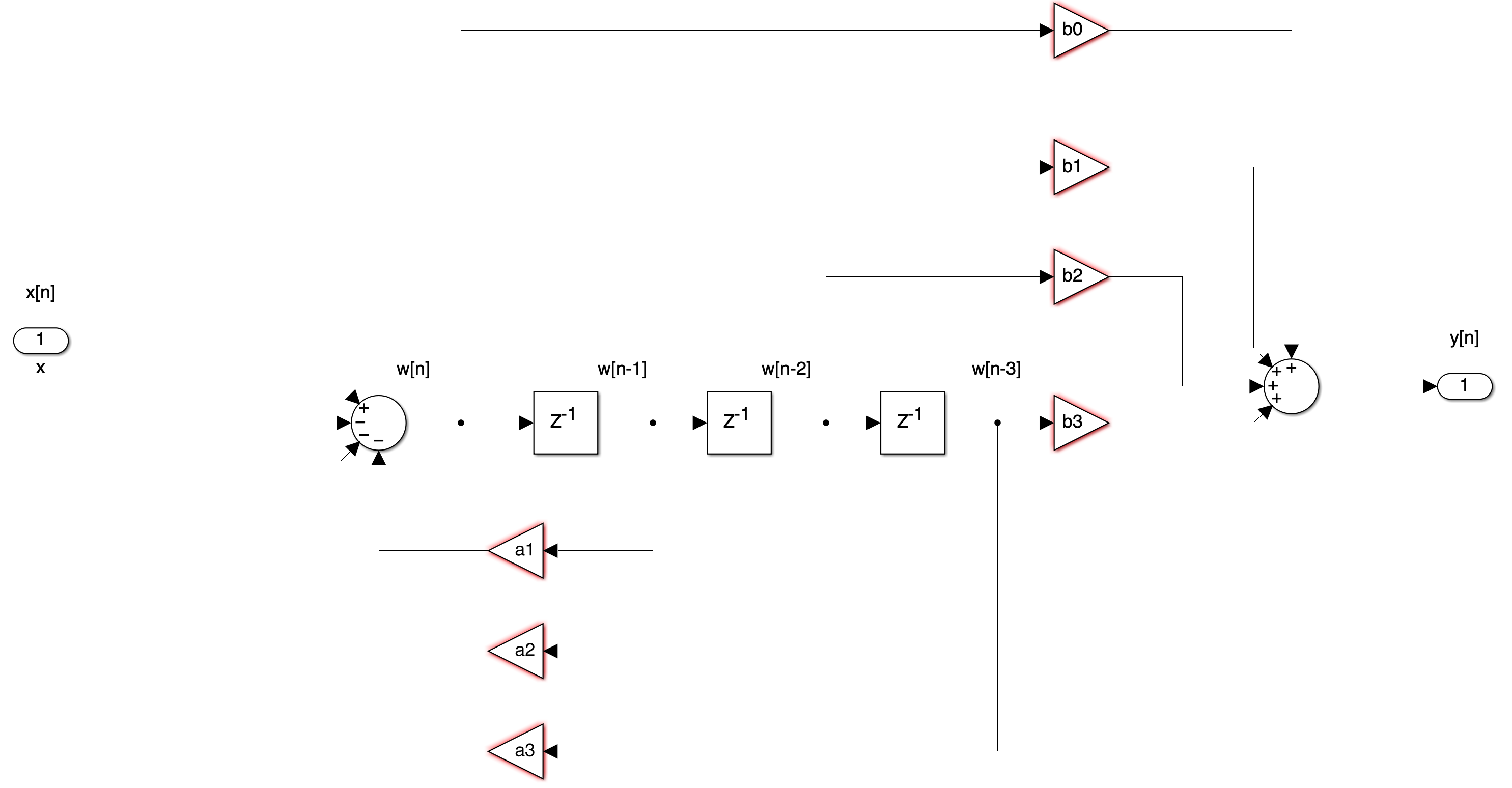
Fig. 15 Recursive digital filter realization in Simulink#
Download Simulink model recursive.slx
Non-recursive realization#
Fig. 16 shows a Simulink model of a third-order non-recursive realization of a digital filter[2]
nonrecursive
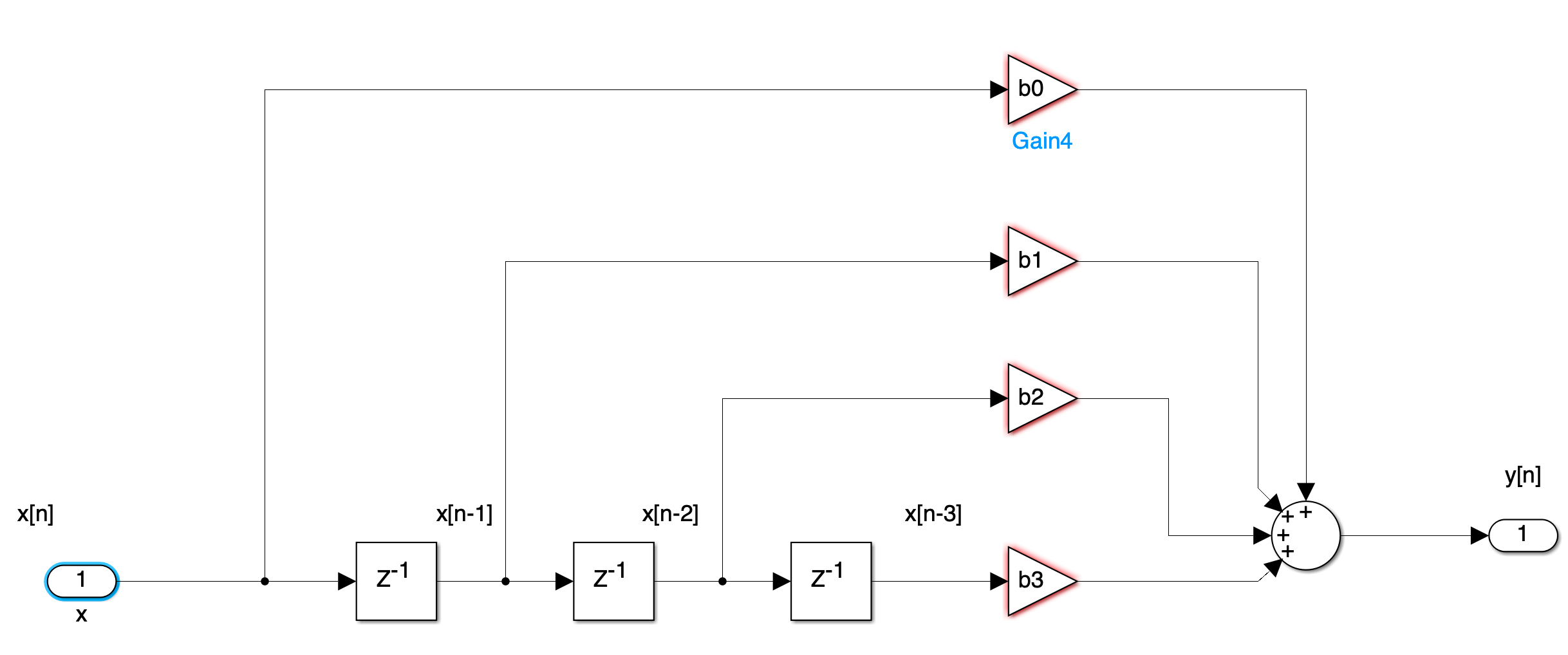
Fig. 16 Non-recursive digital filter realization in Simulink#
Download Simulink model nonrecursive.slx
Generally, IIR filters are implemented by a recursive realization, and FIR filters are implemented by a non-recursive implementation.
Digital filter design methods#
As demonstrated in Unit 7.1: Designing Analogue Filters, filter-design methods have been established and analogue prototypes have been published. Thus, we can choose an appropriate analogue prototype to satisfy the requirements.
Transformation methods are also available to transform analogue prototypes into an equivalent digital filter.
Three commonly used transformation methods are
1. The impulse invariant method#
Produces a digital filter \(H(z)\) whose impulse response consists of the sampled values of the impulse response of the equivalent analogue filter \(H(s)\).
This is implemented in MATLAB by the system transformation function: Hz = c2d(Hs,Ts,'impulse') where Hs is the analogue transfer function \(H(s)\), Ts is the sampling period, and Hz is the equivalent \(H(z)\).
2. The step invariant method#
Produces a digital filter \(H(z)\) whose step response consists of the sampled values of the step response of the equivalent analogue filter \(H(s)\).
3. The bilinear transformation method#
This uses the transformation[3]
to transform the left-half of the \(s\)-plane into the interior of the unit circle in the \(z\)-plane.
In this unit, we will discuss, and assess, only the use of the blinear transformation.
The Bilinear Transformation#
We recall from Relationship Between the Laplace and Z-Transform that since \(z = e^{sT_s}\), \(s = 1/T_s \log_e z\), then a DT transfer function \(H(z)\) can be determined from a CT transfer function \(H(s)\) using the mapping:
But the relation \(s = 1/T_s \log_e z\) is a multi-valued transformation, and as such, cannot be used to derive a rational polynomial in \(z\).
It can be approximated as
Substitution of (40) into (39) yields
Digital frequency response of the bilinear transformation#
The digital frequency response (using \(\omega_d\) on the unit circle in the \(z\)-plane) is obtained by the substitution \(z = e^{j\omega_d T_s}\), giving
Since the \(z\to s\) transformation maps the unit circle on the \(z\)-plane into the \(j\omega\) axis on the \(s\)-plane, the quantity
and \(j\omega\) must be equal to some point \(\omega = \omega_a\) on the \(j\omega\) axis.
That is,
or
or
Frequency warping of the bilinear transformation#
We see that the analogue frequency to digital frequency transformation results in a non-linear mapping; this condition is know as warping.
For instance, the frequency range \(0 \lt \omega_a \le \infty\) the analogue frequency is warped into the range \(0 \le \omega_d \le \pi/T_s\) in digital frequency.
To express \(\omega_d\) in terms of \(\omega_a\), we rewrite (43) as
Then,
and for small \(\omega_a T_s/2\),
Therefore,
that is, for small frequencies,
In MATLAB, \(z\) is a function of normalized frequency and thus the range of frequencies in \(H(z)\) is from \(0 \to \pi\). Then (44), when used with MATLAB, becomes
Pre-warping#
The effect of warping can be eliminated by pre-warping the analogue filter prior to the application of the bilinear transformation. This is acomplished with the use of (43).
Example 12#
Compute the transfer function \(H(z)\) of a low-pass filter with \(3\) dB cutoff frequency at \(20\) Hz, and attenuation of at least \(10\) dB for frequencies greater than \(40\) Hz. The sampling frequency \(f_s = 200\) Hz. Compare the magnitude plot with that obtained by a low-pass analogue filter with the same specifications.
Solution#
We will apply the bilinear transformation. We arbitrarily choose a second-order Butterworth filter which will meet the stop-band specification.
The transfer function \(H(s)\) of the analogue low-pass filter with normalized frequency at \(\omega_c = 1\) rad/s is found with the MATLAB buttap function as follows:
[z,p,k] = buttap(2); [b,a] = zp2tf(z,p,k)
b =
0 0 1
a =
1.0000 1.4142 1.0000
Thus, the transfer function with noramlized frequency, denoted as \(H_n(s)\), is
Now, we must transform this transfer function to another with actual cutoff frequency at \(20\) Hz. We donote it as \(H_a(s)\).
We will first pre-warp the analogue frequency which by relation (43), us related to the digital frequency as
where
Denoting the analogue cutoff (3 dB) frequency as \(\omega_{ac}\), we obtain
or
As expected from relation (45), this frequency is very close to the discrete-time frequency \(f_{dc} = 20\) Hz, and thus from (48),
Relation (48) applies only when the cutoff frequency is normalized to \(\omega_c = 1\) rad/s.
If \(\omega_c \ne 1\), we must scale the transfer function in accordance with relation (32), that is,
For this example, \(\omega_\mathrm{actual} = 130\) rad/s, and thus we replace \(s\) with \(s/130\) and we obtain
We will use MATLAB to simplify this expression
syms s; simplifyFraction(1/((s/130)^2 + 1.414*s/130 + 1))
845000/50
9191/50
ans =
845000/(50*s^2 + 9191*s + 845000)
ans =
16900
ans =
183.8200
Then,
and making the substitution of \(s = (2/T_s)(z -1)/(z + 1) = 400(z-1)/(z + 1)\) we obtain
We use the MATLAB code below to simplify this expression
syms z; simplify(16900/((400*(z-1)/(z+1))^2 + 183.82*400*(z - 1)/(z + 1) + 16900))
ans =
(4225*(z + 1)^2)/(62607*z^2 - 71550*z + 25843)
expand(4225*(z + 1)^2)
ans =
4225*z^2 + 8450*z + 4225
and thus
We will used the MATLAB freqz function to plot the magnitude of \(H(z)\), but we must first express it in negative powers of \(z\).
Dividing each term of (50) by \(62607z^2\), we obtain
The MATLAB script below will generate \(H(z)\) and will plot the magnitude of this transfer function.
az = [1, -1.1428, 0.4128]; bz = [0.0675, 0.1350, 0.0675]; fs = 200; fc = 20;
[Hz, wT] = freqz(bz,az,fc,fs);
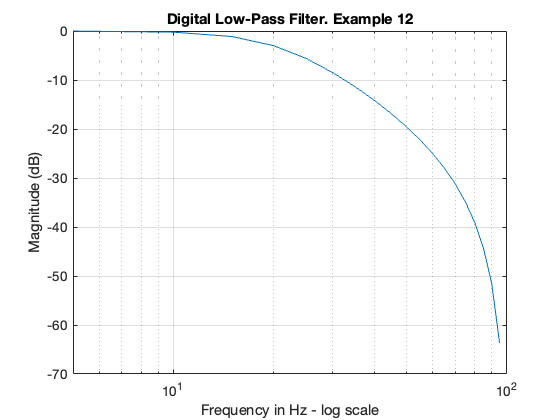
semilogx(wT,20*log10(abs(Hz))); xlabel('Frequency in Hz - log scale')
ylabel('Magnitude (dB)'), title('Digital Low-Pass Filter. Example 12'),grid
We now plot the analogue equivalent to compare the digital to the analogue frequency response.
The MATLAB script below produces the desired plot.
[z,p,k] = buttap(2); [b, a] = zp2tf(z,p,k); f = 1:1:100; fc = 20; [bn,an] = lp2lp(b,a,fc);
Hs = freqs(bn,an,f);
semilogx(f, 20*log10(abs(Hs))), xlabel('Frequency in Hz - log scale')
ylabel('Magnitude (dB)'), title('Analogue Low-Pass Filter. Example 12'),grid
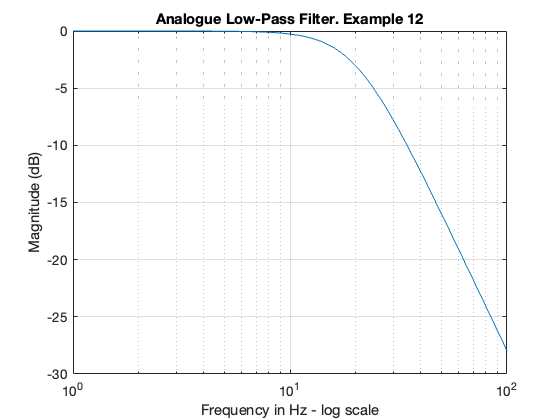
Comparing the digital filter plot with the equivalent analogue filter plot, we observe that the magnitude is greater than \(-3\) dB for frequencies less than \(20\) rad/s, and is smaller than \(-10\) dB for frequencies greater than \(40\) Hz. Therefore, both the digital and analogue low-pass filters meet the specified requirements.[4]
MATLAB bilinear function#
An analogue filter transfer function can be mapped to a digital transfer function directly with the MATLAB bilinear function. The procedure is illustrated with the following example.
Example 13#
Use the MATLAB bilinear function to derive the low-pass digital transfer function \(H(z)\) from a second-order Butterworth analogue filter with a \(3\) dB cutoff frequency at \(50\) Hz, and sample rate \(f_s = 500\) Hz.
Solution#
We will use the following MATLAB script to produce the desired digital filter function:
[z,p,k] = buttap(2); [num,den] = zp2tf(z,p,k); fc = 50; wc = 2*pi*fc;
[num1,den1] = lp2lp(num,den,wc);
fs = 500; [numd,dend] = bilinear(num1, den1, fs)
numd =
0.0640 0.1279 0.0640
dend =
1.0000 -1.1683 0.4241
Therefore, the transfer function \(H(z)\) for this filter is
MATLAB Functions for direct digital filter design#
MATLAB provides us with a suite of functions that we need to design digital filters using analogue prototypes. These are listed below.
N= order of the filterWn= normalized cutoff frequencyRp= pass band rippleRs= stop band rippleB= \(B(z)\), i.e. the numerator of the discrete transfer function \(H(z) = B(z)/A(z)\)A= \(A(z)\), i.e. the denominator of the discrete transfer function \(H(z)\)
The MathWorks also provides a catalogue of filter design tools with examples in the Filter Design Gallery.
For Low-Pass Filters#
[B,A] = butter(N,Wn)
[B,A] = cheb1(N,Rp,Wn)
[B,A] = cheb2(N,Rs,Wn)
[B,A] = ellip(N,Rp,Rs,Wn)
For High-Pass Filters#
[B,A] = butter(N,Wn,'high')
[B,A] = cheb1(N,Rp,Wn,'high')
[B,A] = cheb2(N,Rs,Wn,'high')
[B,A] = ellip(N,rp,Rs,Wn,'high')
For Band-Pass Filters#
[B,A] = butter(N,[Wn1,Wn2])
[B,A] = cheb1(N,Rp,[Wn1,Wn2])
[B,A] = cheb2(N,Rs,[Wn1,Wn2])
[B,A] = ellip(N,Rp,Rs,[Wn1,Wn2])
For Band-Elimination Filters#
[B,A] = butter(N,[Wn1,Wn2],'stop')
[B,A] = cheb1(N,Rp,[Wn1,Wn2],'stop')
[B,A] = cheb2(N,Rs,[Wn1,Wn2],'stop')
[B,A] = ellip(N,Rp,Rs,[Wn1,Wn2],'stop')
Example 13#
The transfer functions (52) through (55), describe different types of digital filters. Use the MATLAB freqz commmand to plot the magnitude versus radian frequency. What types of filter does each transfer function represent? What classes of filter are they?
13(a)#
13(b)#
13(c)#
13(d)#
Solution#
The MATLAB script to plot each of the transfer functions of (52) through (55), is given below where N = 512, i.e. the default value.
b1 = [2.8982, 8.6946, 8.6946, 2.8982]*10^(-3); a1 = [1, -2.3741, 1.9294, -0.5321];
[H1z,w1T] = freqz(b1, a1);
b2 = [0.5276, -1.5828, 1.5828, -0.5276]; a2 = [1, -1.7600, 1.1829, -0.2781];
[H2z,w2T] = freqz(b2, a2);
b3 = [6.8482, 0, -13.6964, 0, 6.8482]*10^(-4); a3 = [1, 3.2033, 4.5244, 3.1390, 0.9603];
[H3z,w3T] = freqz(b3, a3);
b4 = [0.9270, -1.2079, 0.9270]; a4 = [1, -1.2079, 0.8541];
[H4z,w4T] = freqz(b4, a4);
Now do the plots
clf; % clear the current figure
subplot(221), semilogx(w1T,abs(H1z)),axis([0.1 1 0 1]),title('Filter for H1(z)')
xlabel(''),ylabel('Magnitude'),grid
%
subplot(222), semilogx(w2T,abs(H2z)),axis([0.1 10 0 1]),title('Filter for H2(z)')
xlabel(''),ylabel('Magnitude'),grid
%
subplot(223), semilogx(w3T,abs(H3z)),axis([1 10 0 1]),title('Filter for H3(z)')
xlabel(''),ylabel('Magnitude'),grid
%
subplot(224), semilogx(w4T,abs(H4z)),axis([0.1 10 0 1]),title('Filter for H4(z)')
xlabel(''),ylabel('Magnitude'),grid
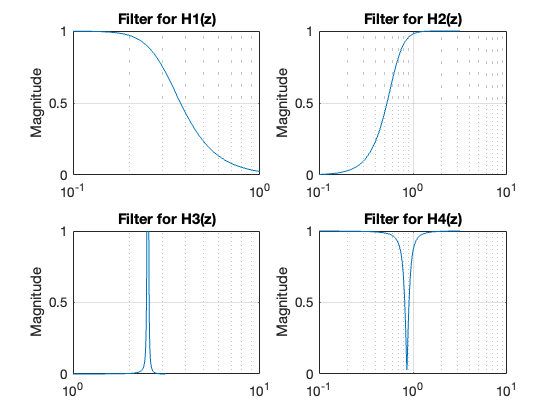
It is clear that the filters are low-pass, high-pass, band-pass and band-stop. There is now ripple in the pass-band or stop band so they are all Butterworth filters.
Digital Filter Design with Simulink#
As stated earlier in this unit, a digital filter is a computational process, or algorithm, that converts one sequence of numbers representing the input signal into another sequence of numbers representing the output signal.
To close out this unit and the module, we will explore Simulink models that can be used to implement digital filters, and present the Digital Filter Design block included in the Simulink DSP System Toolbox, which can generate these models automatically.
The Direct Form I Realization of a Digital Filter#
The Direct Form I Realization of a second-order digital filter is shown in Fig. 17.
dfir_df
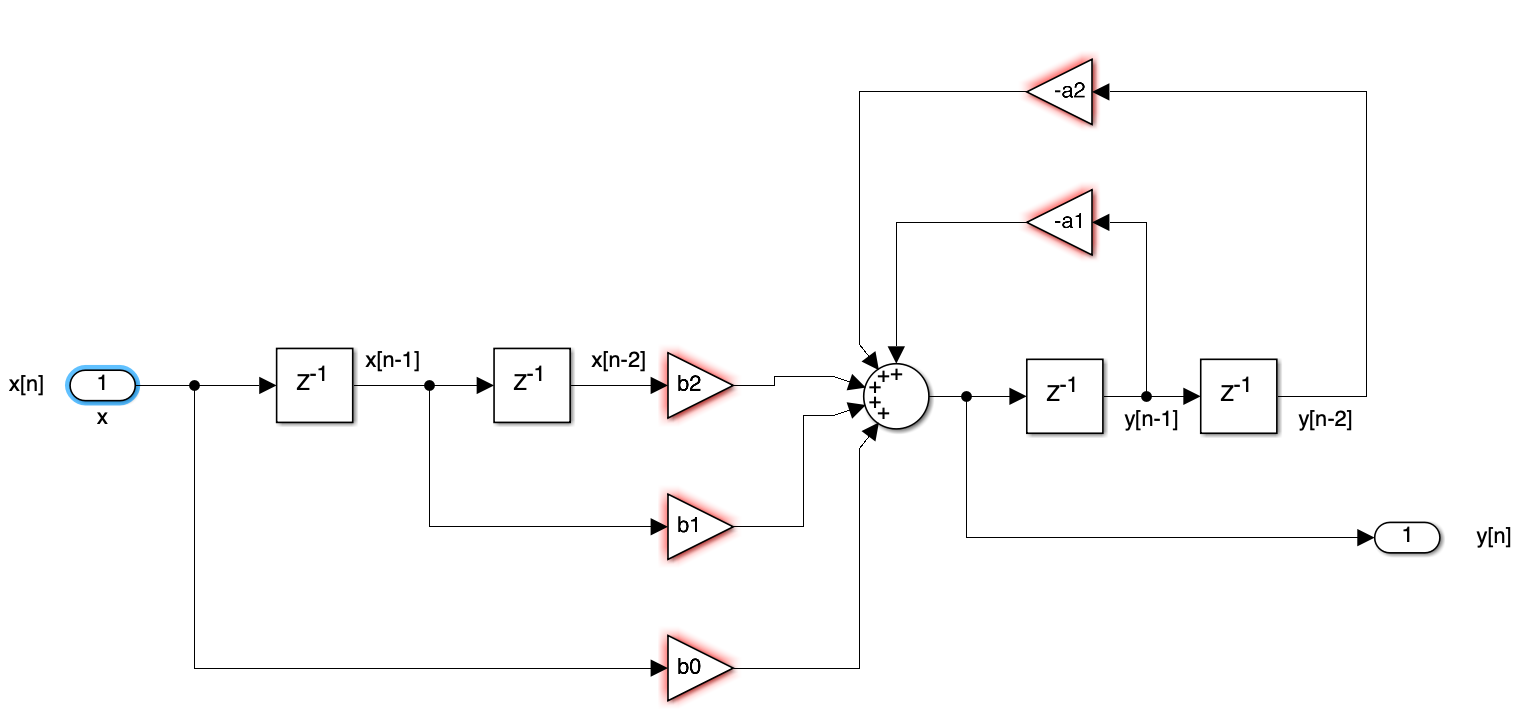
Fig. 17 Direct Form I Realization of a second-order digital filter#
Download this model as dfir_df.
At the summing junction of Fig. 17 we obtain
And thus, the transfer function of the Direct Form I Realization of the second-order digital filter of Fig. 17 is
A disadvantage of the Direct Form I Realization digital filter is that it requires \(2k\) registers where \(k\) represents the order of the filter. We observe that the second-order (\(k=2\)) digital filter of Fig. 17 requires 4 delay (register) elements denoted as \(z^{-1}\). However, this form of realization has the advantage that there is no possibility of internal filter overflow[5].
The Direct Form II Realization of a Digital Filter#
The Direct Form II Realization[6] of a second-order digital filter is shown in Fig. 18. The Simulink Transfer Fcn Direct Form II block implements the transfer function of this filter.
dfiir_df
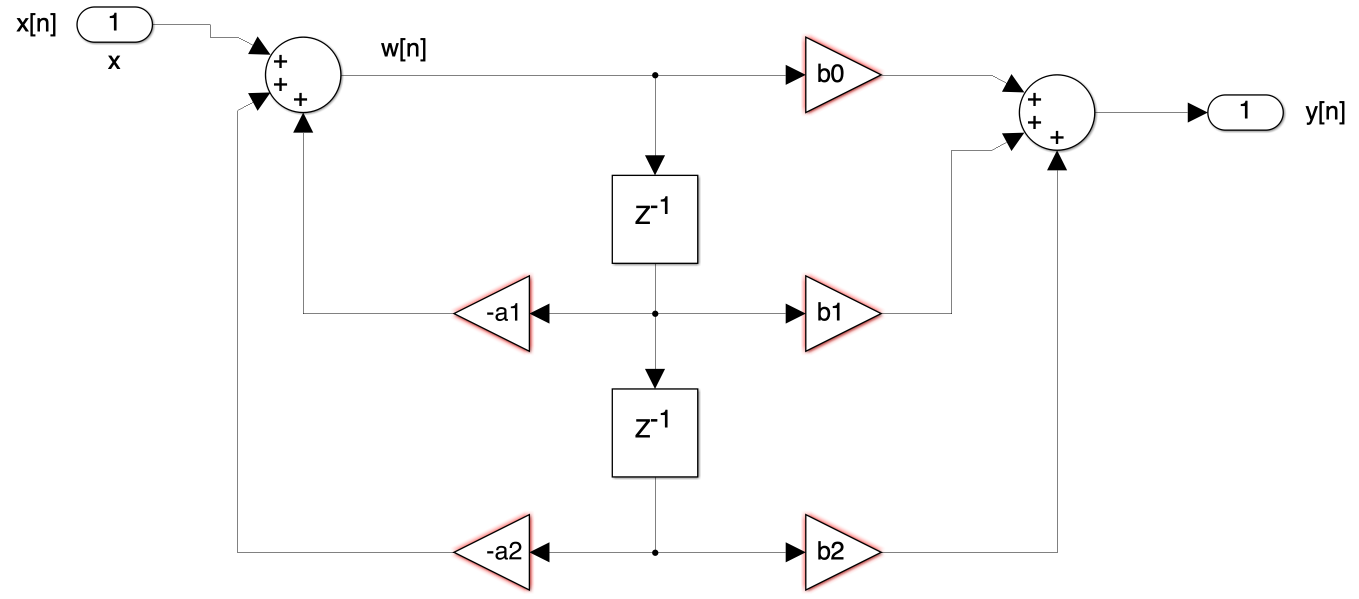
Fig. 18 Direct Form II Realization of a second-order digital filter#
Download this model as dfiir_df.slx.
The transfer function for the Direct Form-II second-order digital filter of Fig. 18 is the same as for a Direct Form-I second-order filter of Fig. 17, that is,
A comparison of (57) and (58) shows that whereas a Direct Form-I second-order digital filter requires \(2k\) registers, where \(k\) represents the order of the filter, a Direct Type-II second-order digital filter requires only \(k\) register elements denoted as \(z^{-1}\). This is because the register (\(z^{-1}\)) elements of the Direct Form-II realization are shared between the zeros section and the poles section.
Example 14#
Fig. 19 shows a Direct Form-II second-order digital filter whose transfer function is
ex14
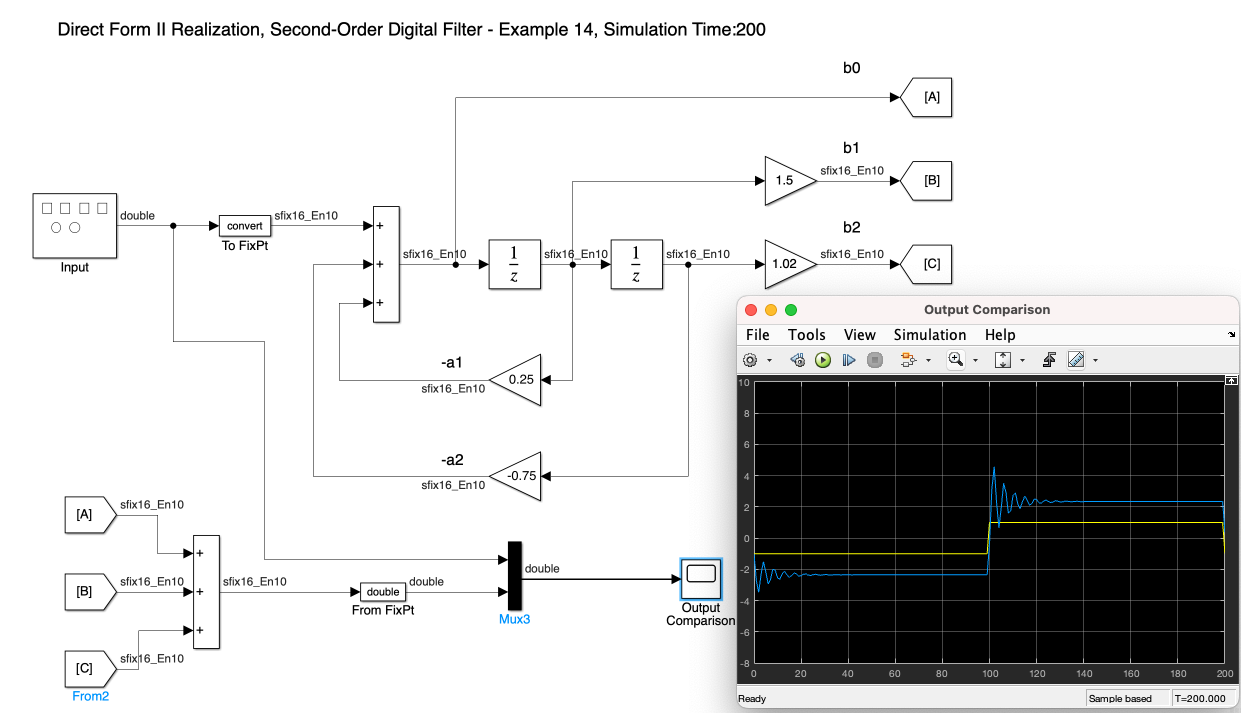
Fig. 19 Model for Example 14#
Download this model as ex14.slx.
The Series Form Realization of a Digital Filter#
For the Series Form Realization, the transfer function is expressed as a product of first-order and second-orer transefer functions as shown in (60) below.
Relation (60) is implemented as the cascaded blocks shown in Fig. 20.

Fig. 20 Series Form Realization#
Fig. 21 shows the Series Form Realization of a second-order digital filter.
series_form_2nd
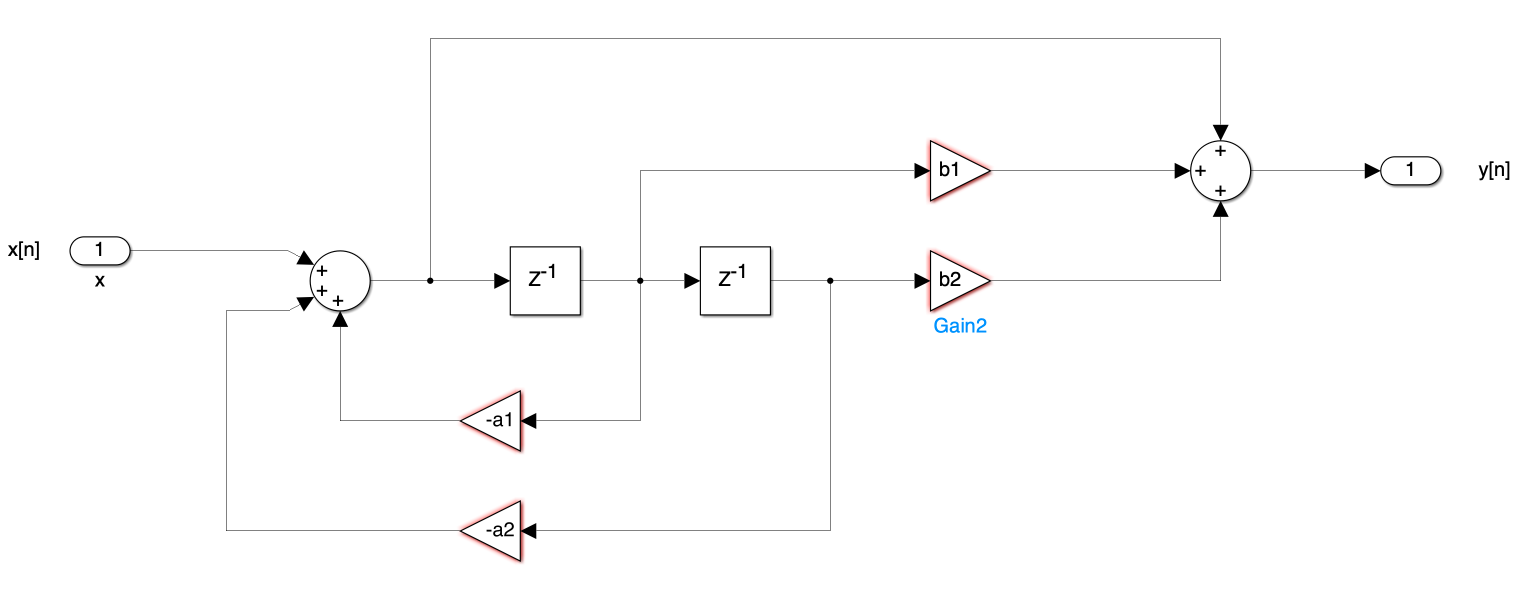
Fig. 21 Series Form Realization of a second-order digital filter#
Download this model as series_form_2nd.slx.
Example 15#
The transfer function of the series form Realization of a certian second-order digital filter is
To implement this filter, we factor the numerator and denominator polynomials as[7]
The Simulink model and the input and output waveforms are shown in Fig. 22.
ex15
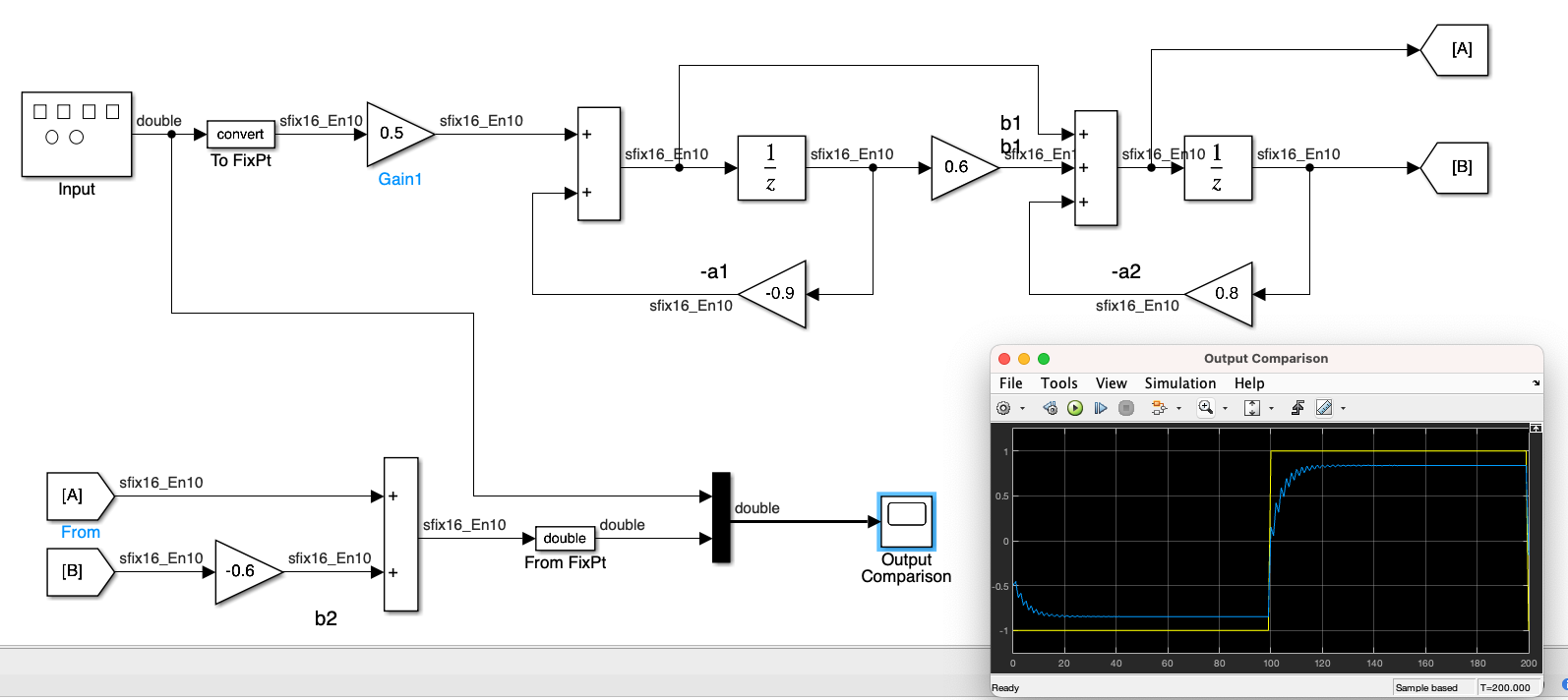
Fig. 22 Model for Example 15#
Download this model as ex15.slx.
The Parallel Form Realization of a Digital Filter#
The general form of the transfer function of a Parallel Form Realization is
Relation (62) is implemented as the parallel blocks shown in Fig. 23.
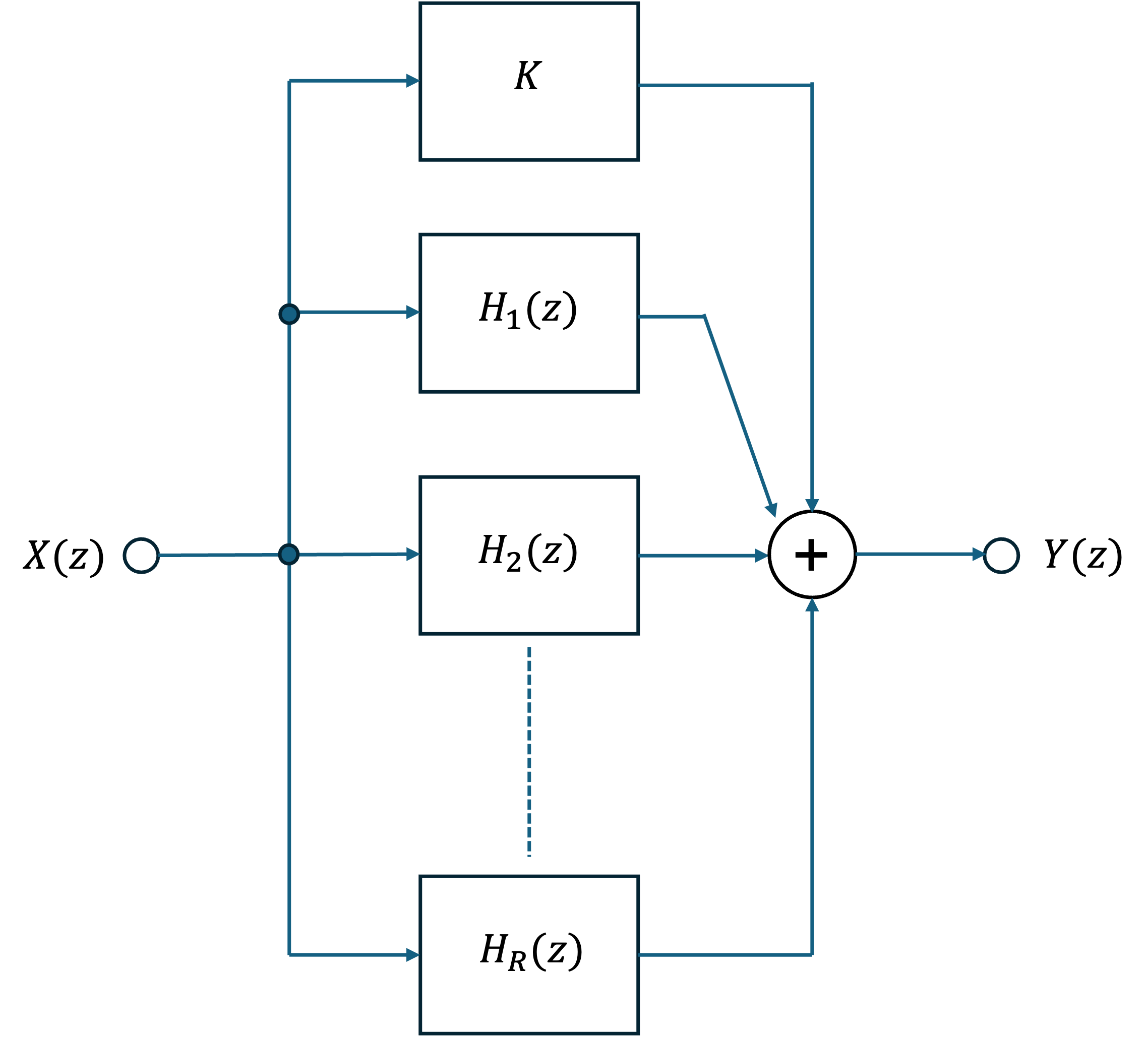
Fig. 23 Parallel Form Realization of a second-order digital filter#
As with the Series Form Realization, the ordering of the individual filters in Fig. 23 is immaterial. But because of the presence of the constant \(K\), we can simplify the transfer function expression by performing the partial fraction expansion after we express the transfer function in the form \(H(z)/z\).
Example 16#
The transfer function of a certain second-order digital filter is
Implement this filter using the Parallel Form Realization.
Next we perform partial fraction expansion
Therefore,
The model and input and output waveforms are shown in Fig. 24.
ex16
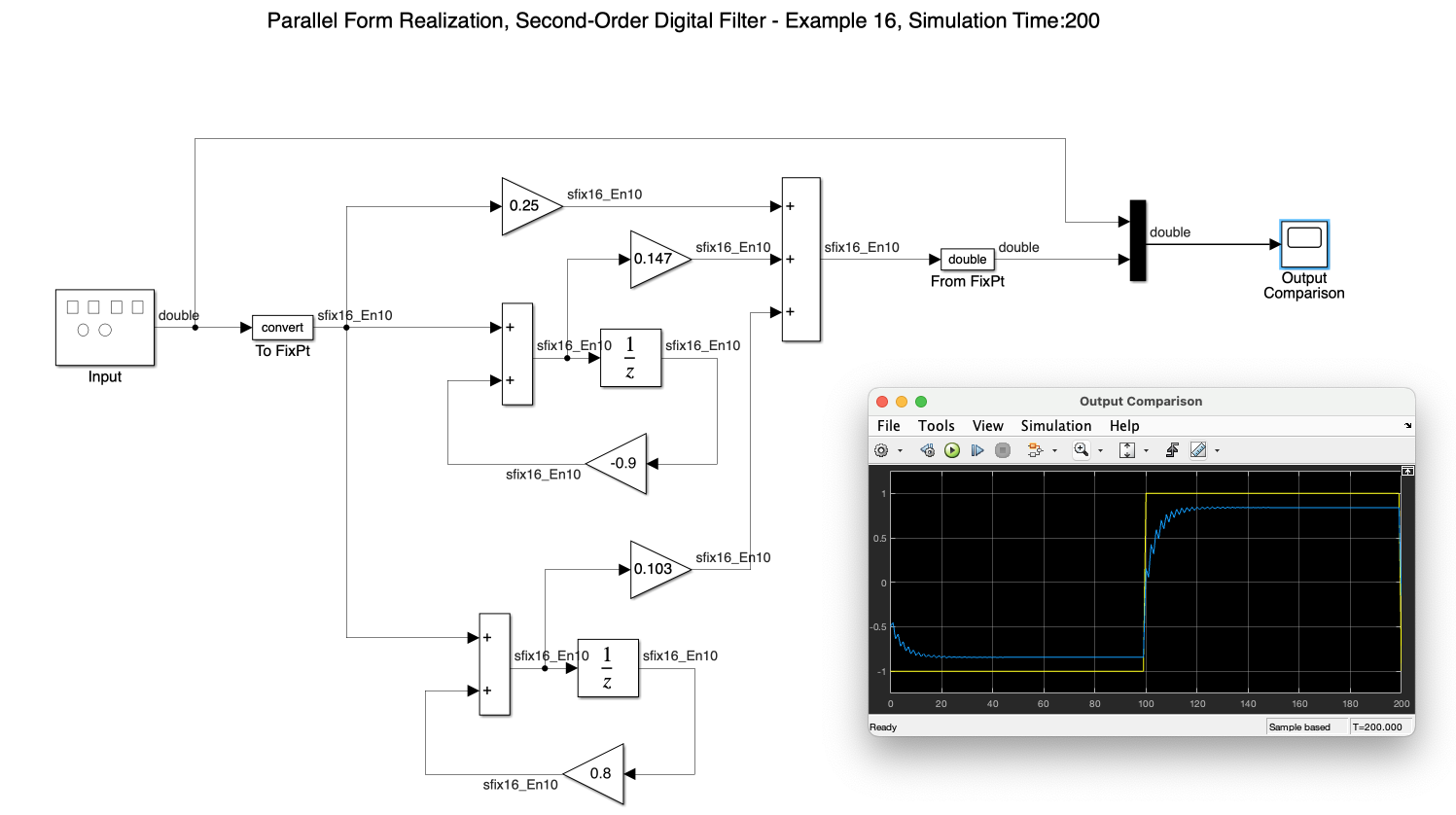
Fig. 24 Model for Example 16#
Download this model as ex16.slx.
The Digital Filter Design Block#
The Digital Filter Design block is included in the DSP System Toolbox and is included in the version of MATLAB for which Swansea University has a site license. It also works on MATLAB online. This block can be used to create models related to digital filter design applications directly in Simulink.
The functionality of this block can be observed by dragging this block from the library into a model and double clicking it.
dfd_block
When this is done, the Block Parameters dialogue box appears as shown in Fig. 25.
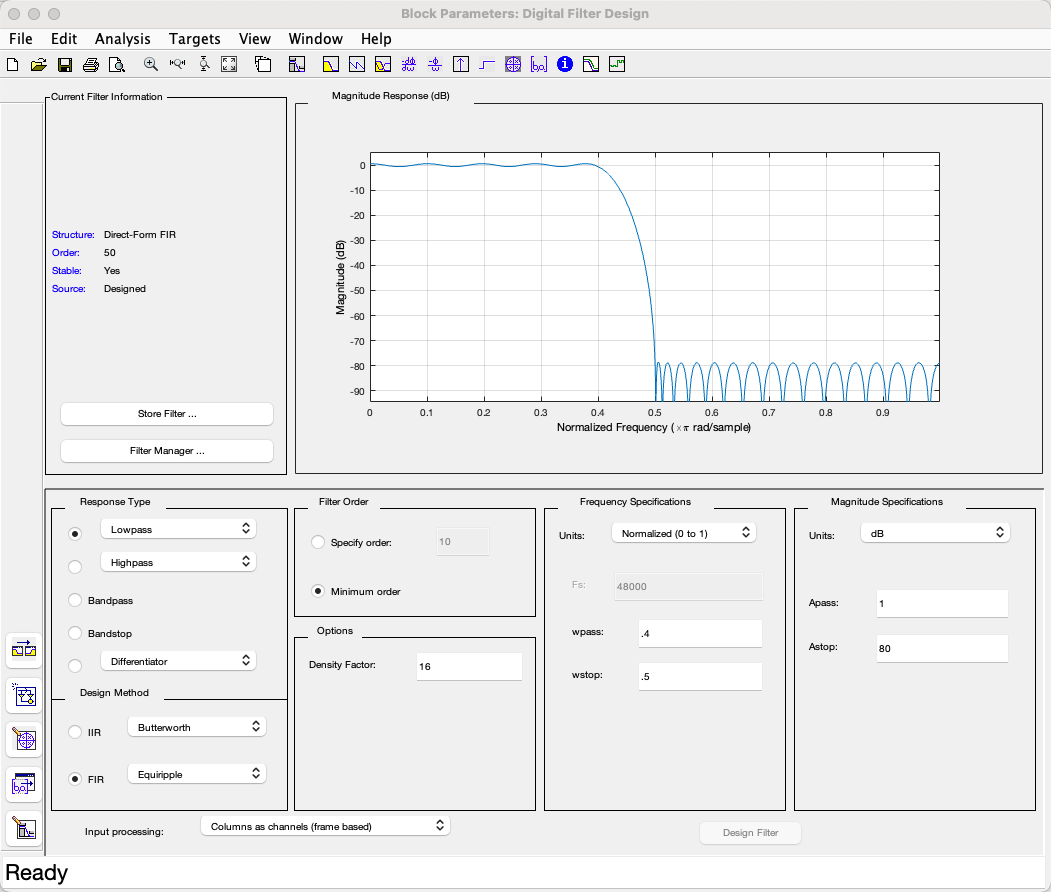
Fig. 25 The Digital Filter Design Block Parameters dialogue box#
Download this model as ex16.slx.
As indicated on the lower left part of this window, we can choose the Response Type (Low-Pass, High-Pass, Band-Pass or Band-Stop), the Design Method (IIR or FIR) where an IIR filter can be Butterworth, Chebyshev Type I, Chebyshev Type II, or Elliptic, and FIR can be Window, Maximally Flat, etc., and the Window[8] can be Kaiser, Hamming etc. We must click on the Design Filter. buttom at the bottom right of the Block Parameters dialogue box to update the specifications.
We will not give an actual example of the use of the Simulink filter design block in these notes. Instead we refer you to Example 11.7 in [Karris, 2012] and also to the relevant page Using Digital Filter Design Block in the MATLAB documentation site. There you will find documentation of the Digital Filter Design Block and several examples of its use.
If you go on from this course to do some actual signal processing, we would urge you to take full advantage of these resources.
Code generation#
As well as the ability to design filters that can be immediately used in simulations of digital signal processing applications, and the muliple analysis tools it provides in the the Digital Filter Design Block, povided by the Signal Processing Toolbox and the DSP System Toolbox, be used for code generation.
For example, it can generate Simulink models of the designed filter, as well as C header files, and HDL code for VHDL and verilog devices.
Thus, MATLAB can be used in a so-called model-based design process as described in the opening video
The End?#
This concludes this module. Don’t forget to let us know how it went for you in the end of module feedback.
There are exercises in the notes which will give you practice in the sort of questions that will come up in the exam.
Hopefully you found the module interesting and will make use of some of your knowledge after the exams are over!
Exercises#
Exercise 7.2.1#
Exam Preparation
Use the block diagram shown in Fig. 15 to validate (37) and (36).
Exam Preparation
Exercise 7.2.2#
Use the block diagram shown in Fig. 18 to validate (54). Write down the equivalent difference equation.
Exercise 7.2.3#
Exam Preparation
Design a 2nd-order Butterworth filter with \(\omega_c = 20\) kHz. Use the Bilinear transformation to convert the analogue filter to a digital filter with sampling frequency of 44.1 kHz. Use pre-warping to ensure that the cutoff frequency is correct at the equivalent digital frequency.
Exercise 7.2.4#
Exam Preparation
A digital filter with cutoff frequency of 100 Hz for a signal sampled at 1 kHz has transfer function
The frequency response for this filter (plotted against \(f/(f_s/2)\)) is shown in Fig. 26.
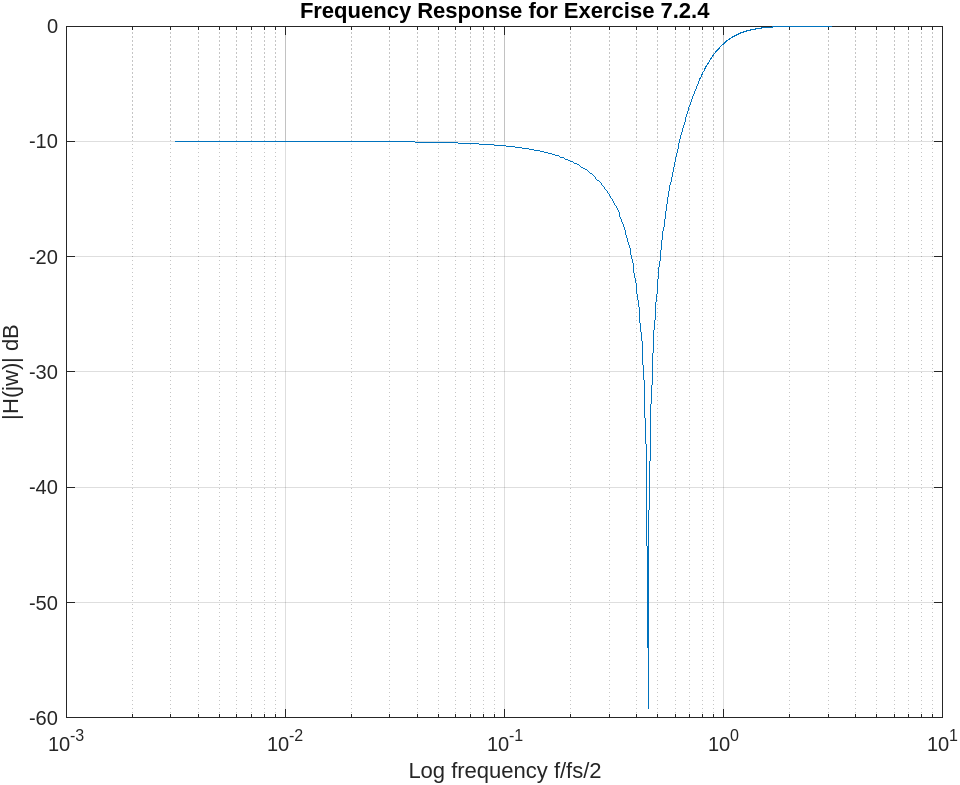
Fig. 26 Frequency response for Example 7.2.4#
a) What type of filter is this?
b) Estimate the band-pass ripple, and stop-band ripple of the filter.
c) Implement the filter as Direct Form Type II digital filter and sketch its block diagram.
d) Use the example of Convert to code to give a code implementation of the filter.
e) If the input to this filter is a step function \(x[n] = \left\{1,1,1,1,\ldots\right\}\), calculate the first 5 outputs \(y[n]\) of the filter.
References#
See Bibliography.