Homework 3: Lag Compensation¶
Problems¶
A satellite attitude control system has an open-loop transfer function
\[G_o(s)=\frac{4(s+2)}{s}\]determine the low frequency gain required to ensure that the steady-state error to a constant acceleration input of 1 rad/s2 is 1/40 rad. Design a lag compensator to give the required low frequency gain.
A plant has a transfer function
\[G(s) = \frac{K}{s(s+10)^2}\]The velocity constant \(K_v\) of a feedback control system for this plant is to be 20, while the damping ratio \(\zeta\) of the dominant second-order closed-loop poles is to be 0.707. Design a lag compensator to achieve this specification.
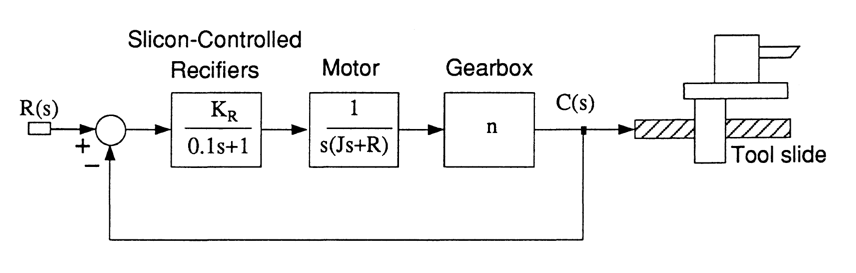
A numerical path-controlled turret lathe control system is illustrated in Figure 1. The gear ratio is \(n = 0.1\), the motor inertia is \(J = 10^{- 3}\) kg.m2 and the motor resistance is \(R = 10^{-2}\) Nm/(rad/s). It is necessary to attain an accuracy of 0.5 thousandths of an inch in the position of the cutting tool relative to the workpiece and therefore a position accuracy of 1% is required for a ramp input. Design a cascade controller, to be inserted before the silicon-controlled-rectifiers (SCRs), in order to provide a step command with an overshoot of less than 2%. A suitable damping ratio for the system is 0.8. The gain of the SCRs is \(K_r = 5\).