6.3. Continuous System Equivalence¶
6.3.1. Introduction¶
In many cases, e.g. signal processing, control systems, etc., we want to design a digital system so that it behaves (dynamically and in steady-state) the same as a continuous system. A digital system that has the same input-behaviour as a (sampled) continuous system is called a continuous equivalent.
6.3.2. Agenda¶
In the pre-lecture presentation we will start by discussing the relationship of \(s\) to \(z\). We will then present four ways to convert a transfer function \(H(s)\) into its digital equivalent \(H(z)\). These are:
The zero-order hold equivalent
The Tustin bilinear transform equivalent
Matched pole zero equivalent
Modified matched pole-zero equivalent
6.3.3. Examples¶
Will be done in class
Before we can describe what we might mean by a continuous equivalent system, it is necessary to establish the relationship between digital operations, such as the shift, and continuous operations.
6.3.4. Equivalence of s and z¶
6.3.4.1. Sampling a Delayed Signal¶
Consider a simple operation of sampling with a delay
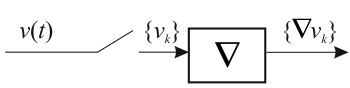
This can be represented in transform as
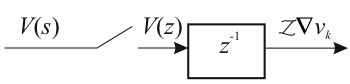
6.3.4.2. Delaying a Sampled Signal¶
The same result could be obtained by delaying the continuous signal and then sampling.
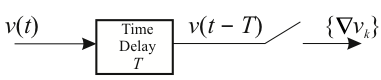
Which can be represented in transform as
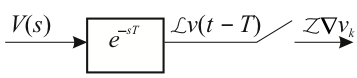
6.3.4.3. Relationship of z to s¶
From the preceding arguments
That is $\(\begin{equation} z=e^{sT}\end{equation}\)$
or $\(\begin{equation} s=\frac{1}{T}\ln z\end{equation}\)$
This is the fundamental relationship of equivalence. Before using it, we must see how a continuous signal is reconstructed from a digital signal. This is accomplished by means of a “Digital-to-Analogue Converter”
6.3.5. Digital-to-Analogue Converter¶
6.3.5.1. Modelling a DAC with a Zero-Order Hold¶
The simplest converter is a “Zero-Order Hold” (see Fig. 1). This acts the opposite way to a sampler.
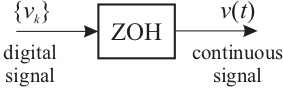 Figure 1: zero-order Hold
Figure 1: zero-order Hold
6.3.5.2. Operation of the Zero-order Hold¶
During each sample period, the device holds the output \(v(t)\) constant at the current value of the digital signal \(v_k\).
That is $\(\begin{equation} v(t) = v_k\ \mathrm{for}\ kT \le t < (k+1)T\end{equation}\)$
This generates a stepwise continuous signal \(v(t)\) which at the sampling instants is equal to the continuous signal from which the digital signal \({v_k}\) was generated.
The signal may be considered as an infinite number of pulses of which the \(k\)-th is that shown in the next slide.
6.3.5.3. Modelling the ZOH Mathematically¶
6.3.5.3.1. Step-wise continuous signal¶
This represents the output of the zero-order hold \(v(t) = v_k\) for \(kT \le t < (k+1)T\).
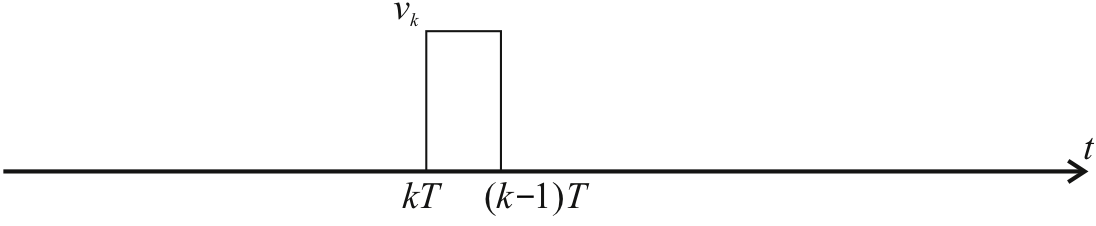
To model such a signal we use the so-called “gating” property of the time-delayed unit-step function \(\epsilon(t)\) illustrated in the next slide.
6.3.5.3.2. The Gating Function¶
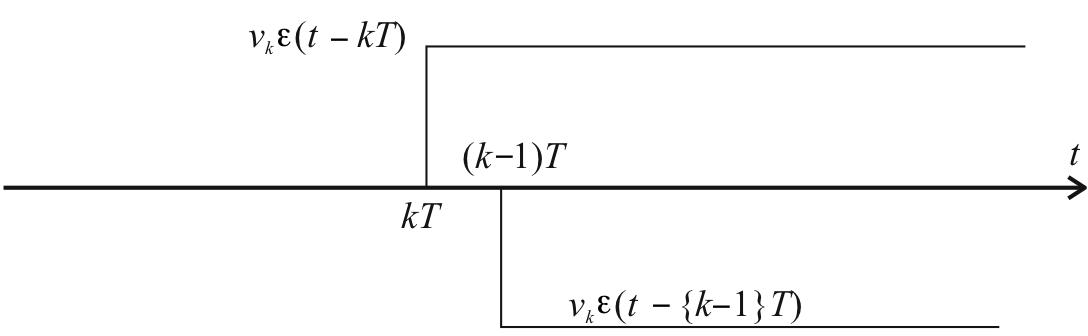
The opening “gate” is given by \(v_k \epsilon (t-kT)\), a step of height \(v_k\), which is activated at \(t=kT\) seconds. The gate is “closed” by a negative going unit step, also of height \(v_k\), which is activated at \(t=\{k+1\}T\) seconds.
The sum of these two signals is $\(\begin{eqnarray*} p(t) &=& v_k \epsilon(t - kT) - v_k \epsilon(t - \{k+1\}T)\\ &=& v_k\left[\epsilon(t - kT) - \epsilon(t - \{k+1\}T)\right]\end{eqnarray*}\)$
So for the sequence: $\(\begin{equation} v(t) = \sum_{k=0}^{\infty} v_k\left[\epsilon(t - kT) - \epsilon(t - \{k+1\}T)\right]\end{equation}\)$
In transform form this is $\(\begin{eqnarray*} V(s) &=& \sum_{k=0}^{\infty} v_k\left(\frac{1}{s}e^{-kTs} - \frac{1}{s}e^{-\left\{k+1\right\}Ts}\right)\\ &=& \frac{1}{s}\left(1-e^{-Ts}\right) \sum_{k=0}^{\infty} v_k e^{-kTs}\\ &=& \frac{1}{s}\left(1-z^{-1}\right) \sum_{k=0}^{\infty} v_k z^{-k}\\ &=& \frac{1}{s}\,\frac{z-1}{z}\,V(z)\end{eqnarray*}\)$
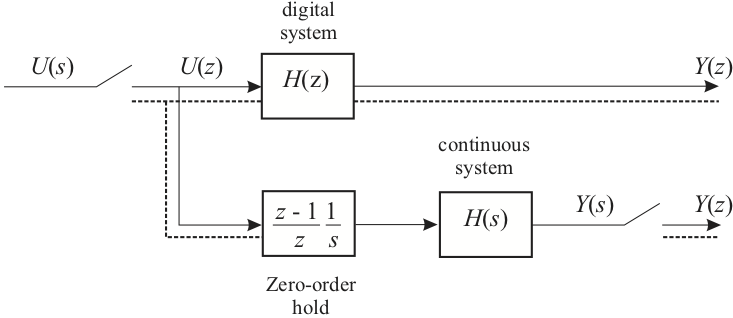
So the zero-order hold is represented by the mixed transfer function $\(\begin{equation} G_{\mathrm{zoh}}=\frac{1}{s}\,\frac{z-1}{z}\end{equation}\)$ as shown in Fig. 2.
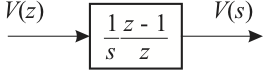 Figure 2: Transfer Function of the Zero-Order Hold
Figure 2: Transfer Function of the Zero-Order Hold
We can now design a ‘hold-equivalent’ digital system.
6.3.5.3.3. Hold-Equivalent Digital System¶
From the diagram in the previous slide.
so $\(\begin{equation} H(z) = \frac{z-1}{z} \mathcal{Z} \frac{H(s)}{s}\end{equation}\)$
#### Example 1
If
then find the Zero-Order Hold Equivalent \(H(z)\)
6.3.5.3.3.1. Solution¶
Malab note: the zero-order-hold equivalent is the default system used for continuous system equivalence in MATLAB. To convert a continous system in any lti format1 use:
lti_d = c2d(lti, Ts); % You must provide a sampling time or use -1 if undefined
6.3.6. Other Continuous System Equivalences¶
6.3.6.1. Approximation based on numerical integration¶
An alternative approach is to use the relationship
This cannot be substituted into a transfer function directly as the result is not rational, but an approximation may be used.
6.3.6.1.1. Approximation by Numerical Integration¶
We wish to find a transfer function \(T(z)\) that is equivalent to \(T(s)=s\).
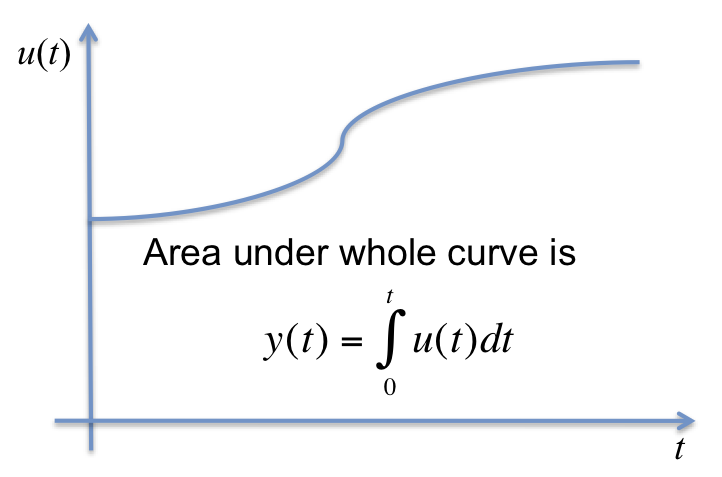
Let us instead seek a transfer function \(D(z)\) that is equivalent to \(D(s) = 1/s\).

Thus, the transfer function we are seeking will in fact be an approximation of the integral \(y(t)=\int u(t) dt\). We can illustrate this as shown in the next slide.
6.3.6.1.2. Model of Integration¶
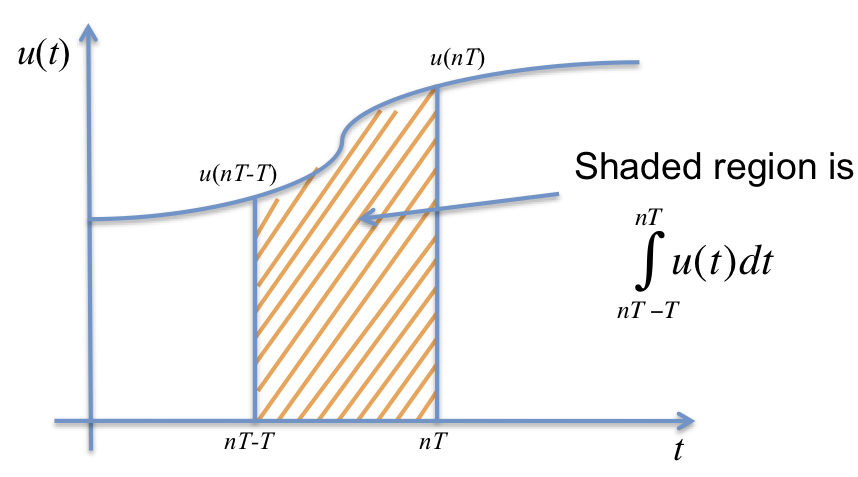
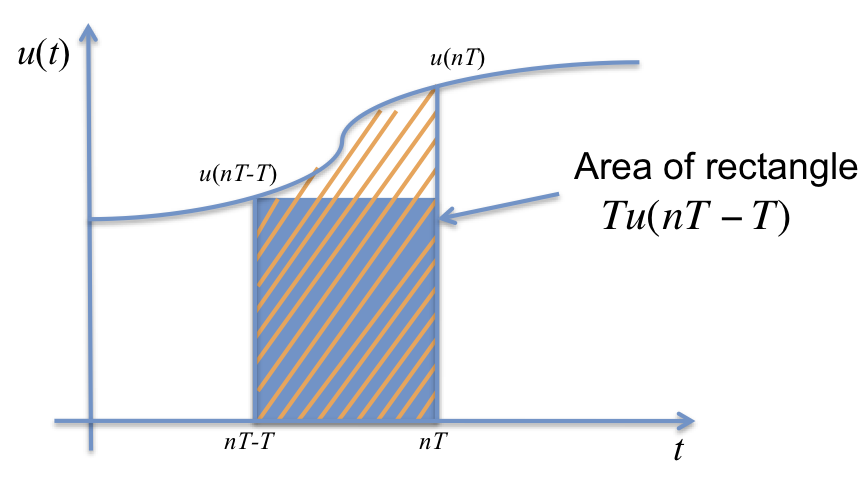
If we sample the curve \(u(t)\) and consider the situation at the \(n\)-th sampling instant, we will have
We can rewrite this as $\(y(nT)= \int_{0}^{nT-T} u(t) dt + \int_{nT-T}^{nT} u(t) dt\)$
where the second integral term is the shaded area shown in the next slide,
6.3.6.1.3. Sampled Model of Integration¶
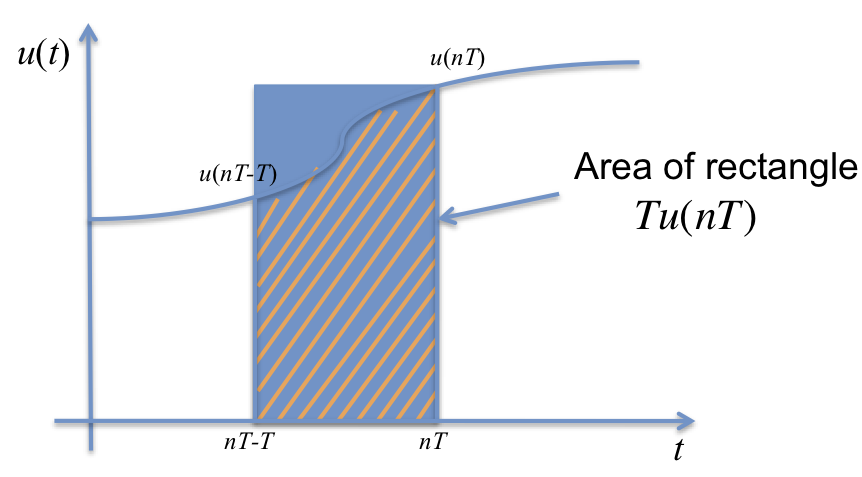
Now if we assume that the first integral term was approximated by the digital integrator in the previous sampling instant, then \(y(nT-T) = \int_{0}^{nT-T} u(t) dt\) is known, and consequently we have
and we only need to determine the area of the shaded region to approximate \(y(nT)\).
The most obvious approximations are illustrated in the next three slides.
6.3.6.1.4. Forward Rectangular Approximation¶
6.3.6.1.5. Backward Rectangular Approximation¶
6.3.6.1.6. Trapezoidal Approximation¶
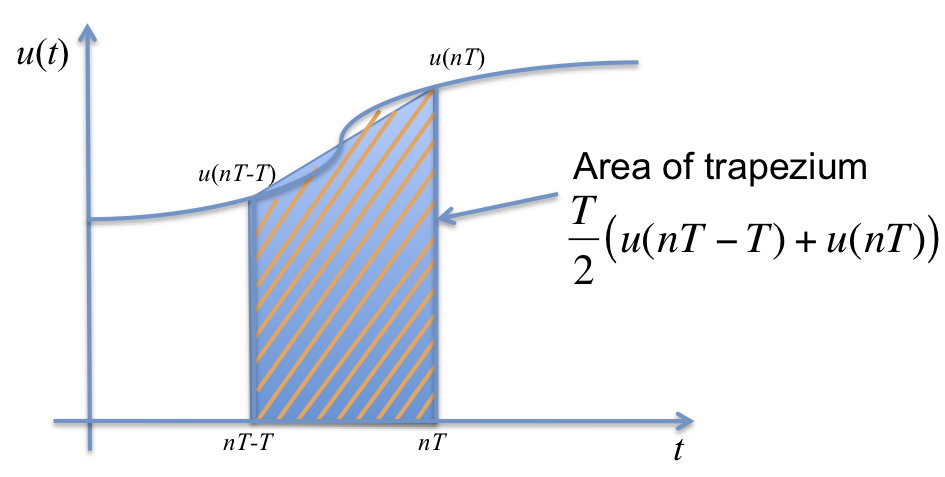
It is clear that if we are to disallow any further subdivision of the shaded area, the trapezoidal approximation will provide the most accurate result.
6.3.6.1.7. z-transform of trapezoidal approximation¶
Completing the analysis, we can show that
which on taking z-transforms gives
thus
6.3.6.1.8. Approximation of s by numerical integration¶
By comparison with continuous integration \(Y(s)/U(s)=1/s\), this result, obtained by numerical integration allows us to say that
These results are summarised in the next few slides.
6.3.6.2. Summary of Numerical Integration Methods¶
6.3.6.2.1. Trapezoidal approximation¶
compare expansion
with
This approximation is known as “Tustin’s Bilinear Transformation”.
6.3.6.2.2. Forward rectangular approximation¶
compare with
6.3.6.2.3. Backward rectangular approximation¶
compare expansion
with
6.3.6.3. Example 2¶
If
determine the equivalent \(H(z)\) using Tustin’s bilinear transformation.
6.3.6.3.1. Solution¶
Tustin’s bilinear transformation gives a digital system with transfer function
Malab note: the bilinear transform equivalent is obtained by passing
the argument 'tustin' to the c2d method:
lti_d = c2d(lti, Ts, 'tustin');
6.3.6.4. Matched pole-zero approximations¶
Another way to obtain a digital approximation of a continuous transfer function is to use the relationship \(z = e^{sT}\) to map poles and zeros of the continuous transfer function into poles and zeros in the z-transfer function.
Since continuous transfer functions often have more poles than zeros, that is \(n-m\) zeros at infinity, zeros at infinity are replaced in the z-transfer function by zeros at \(z = -1\) which is equivalent to half the sampling frequency \(\omega_s/2\) (i.e. the highest frequency possible in the z-domain). Thus if \(n-m =1\) we add \((1+z^{-1})\), if \(n-m=2\), \((1+z^{-1})^2\), etc.
6.3.6.4.1. Matched-Pole Zero method¶
Idea is that all poles and zeros of continuous transfer function \(D(s)\) can become poles and zeros of digital transfer function \(D(z)\) if the mapping \(z=e^{sT}\) is used.
Method:
Map finite poles and zeros of \(D(s)\) to poles and zeros of \(D(z)\) according to \(z=e^{sT}\).
Add zeros at \(z=-1\) for each infinite zero in \(D(s)\).
Match DC or low-frequency gain.
6.3.6.4.2. Example 3¶
Use the Matched-Pole-Zero (MPZ) approximation to give the z-transfer function equivalent to
6.3.6.4.2.1. Solution¶
Order of numerator and denominator are equal so there are no infinite zeros and by matching poles and zeros
For \(D(s)\) the DC gain is \(D(s)|_{s=0} = a/b\).
The DC gain for \(D(z)\) is
(from final value theorem) that is
We choose \(k\) so that the DC gains match, i.e.
6.3.6.4.3. Example 4¶
Use the Matched-Pole-Zero (MPZ) approximation to give the z-transfer function equivalent to
6.3.6.4.3.1. Solution¶
Here, the order of the denominator is one greater than the numerator so there is \(n-m = 2 - 1 = 1\) infinite zero. Placing this zero at \(z = -1\) makes the MPZ transfer function
As \(D(s)\) is type 1, we can’t use the value of \(D(0)\) to compute the DC gain. Instead, let us compute the gain at \(s = -1\):
The equivalent value \(s=-1\) in the \(z\)-plane is \(z=e^{-T}\).
Again, we choose \(k\) so that the equivalent gains match, i.e.
We would implement \(D(z)\) as a difference equation defined in terms of the sampled inputs and outputs as shown for Example 3.
6.3.6.4.4. Implementation of an MPZ Approximation¶
If
then the digital implementation will be
\(y(n)\) is the current calculated value, \(y(n-1)\) is previous calculated value, \(u(n)\) is current sample, and \(u(n-1)\) is previous sample.
Implementation only works if computation rate \(<<\) significant dynamics of the sampled system and a small fraction of sampling time \(T\).
In the implementation, you should notice that it is actually physically impossible to sample \(u(t)\), compute \(y(n)\) and output \(y(n)\) all at the same instant of time. Hence the equation is actually impossible to implement. However, if the computation is sufficiently fast, the delay between sampling \(u(t)\) and outputting \(y(t)\) will be small and can often be neglected. A rule of thumb has computation delay \(< t_r/20\) of the dominant pole. It should certainly be a small fraction of the sampling period \(T\).
6.3.6.4.5. Modified MPZ¶
Used if constraint on computation time cannot be met2.
Allow a zero at infinity in \(D(z)\) so that order of numerator is one less than denominator.
This ensures that only past values of \(u\) and \(y\) appear in the implementation equation and a whole sample period is available for computation
6.3.6.4.6. Example 5¶
Re-implement Example 3 using the Modified MPZ method.
6.3.6.4.6.1. Solution¶
If we allow an infinite zero
becomes
and
The implementation is now
and now the computation for \(y(n)\) is performed only on past values of \(u(n)\) and \(y(n)\) and a whole sample period is available for computation.
Matlab note: the matched-pole zero equivalent of an LTI system is
obtained by passing 'matched' as the third argument to c2d:
lti_d = c2d(lti, Ts, 'matched')
There isn’t a built-in method that returns the modified-matched-pole zero equivalent.
6.3.7. Footnotes¶
1: The LTI functions are tf, ss, and zpk. For more information,
type help lti inside MATLAB.
2: Which these days is unlikely
6.3.8. End of Pre-Class Presentation¶
In class we will do the examples and conclude with a MATLAB demo.
6.3.9. MATLAB example¶
Available as a MATLAB Live Script file cse.mlx.
Let
Set up MATLAB
clear all
cd matlab
pwd
format compact
imatlab_export_fig('print-svg') % Static svg figures.
ans =
'/Users/eechris/code/src/github.com/cpjobling/eglm03-textbook/06/3/matlab'
Let \(a = 1\)
a = 1;
Then
Gs = tf([a],[1, a])
Gs =
1
-----
s + 1
Continuous-time transfer function.
Sample period
Ts = 1/5; % seconds
6.3.9.1. Hold equivalent¶
Gz_zoh = c2d(Gs, Ts, 'zoh')
Gz_zoh =
0.1813
----------
z - 0.8187
Sample time: 0.2 seconds
Discrete-time transfer function.
This is also default
Gz_zoh = c2d(Gs, Ts)
Gz_zoh =
0.1813
----------
z - 0.8187
Sample time: 0.2 seconds
Discrete-time transfer function.
Plot Result
step(Gs,'-',Gz_zoh,'--')

6.3.9.2. Approximation by numerical-integration¶
Also known as the bilinear transform or Tustin equivalent
Gz_tustin = c2d(Gs, Ts, 'tustin')
Gz_tustin =
0.09091 z + 0.09091
-------------------
z - 0.8182
Sample time: 0.2 seconds
Discrete-time transfer function.
Plot Result
step(Gs,'-',Gz_tustin,'--')

6.3.9.2.1. Matched pole-zero mapping¶
Gz_mpz = c2d(Gs, Ts, 'matched')
Gz_mpz =
0.1813
----------
z - 0.8187
Sample time: 0.2 seconds
Discrete-time transfer function.
Plot result
step(Gs,'-',Gz_mpz,'--')

6.3.9.2.2. Other supported equivalents?¶
help c2d
C2D Converts continuous-time dynamic system to discrete time.
SYSD = C2D(SYSC,TS,METHOD) computes a discrete-time model SYSD with
sample time TS that approximates the continuous-time model SYSC.
The string METHOD selects the discretization method among the following:
'zoh' Zero-order hold on the inputs
'foh' Linear interpolation of inputs
'impulse' Impulse-invariant discretization
'tustin' Bilinear (Tustin) approximation.
'matched' Matched pole-zero method (for SISO systems only).
'least-squares' Least-squares minimization of the error between
frequency responses of the continuous and discrete
systems (for SISO systems only).
'damped' Damped Tustin approximation based on TRBDF2 formula
(sparse models only).
The default is 'zoh' when METHOD is omitted. The sample time TS should
be specified in the time units of SYSC (see "TimeUnit" property).
C2D(SYSC,TS,OPTIONS) gives access to additional discretization options.
Use C2DOPTIONS to create and configure the option set OPTIONS. For
example, you can specify a prewarping frequency for the Tustin method by:
opt = c2dOptions('Method','tustin','PrewarpFrequency',.5);
sysd = c2d(sysc,.1,opt);
For state-space models,
[SYSD,G] = C2D(SYSC,Ts,METHOD)
also returns the matrix G mapping the states xc(t) of SYSC to the states
xd[k] of SYSD:
xd[k] = G * [xc(k*Ts) ; u[k]]
Given an initial condition x0 for SYSC and an initial input value u0=u(0),
the equivalent initial condition for SYSD is (assuming u(t)=0 for t<0):
xd[0] = G * [x0;u0] .
See also C2DOPTIONS, D2C, D2D, DYNAMICSYSTEM.
Documentation for c2d
doc c2d
Other functions named c2d
DynamicSystem/c2d ltipack.tfdata/c2d ltipack.zpkdata/c2d
ltipack.ssdata/c2d