5. Some useful design curves¶
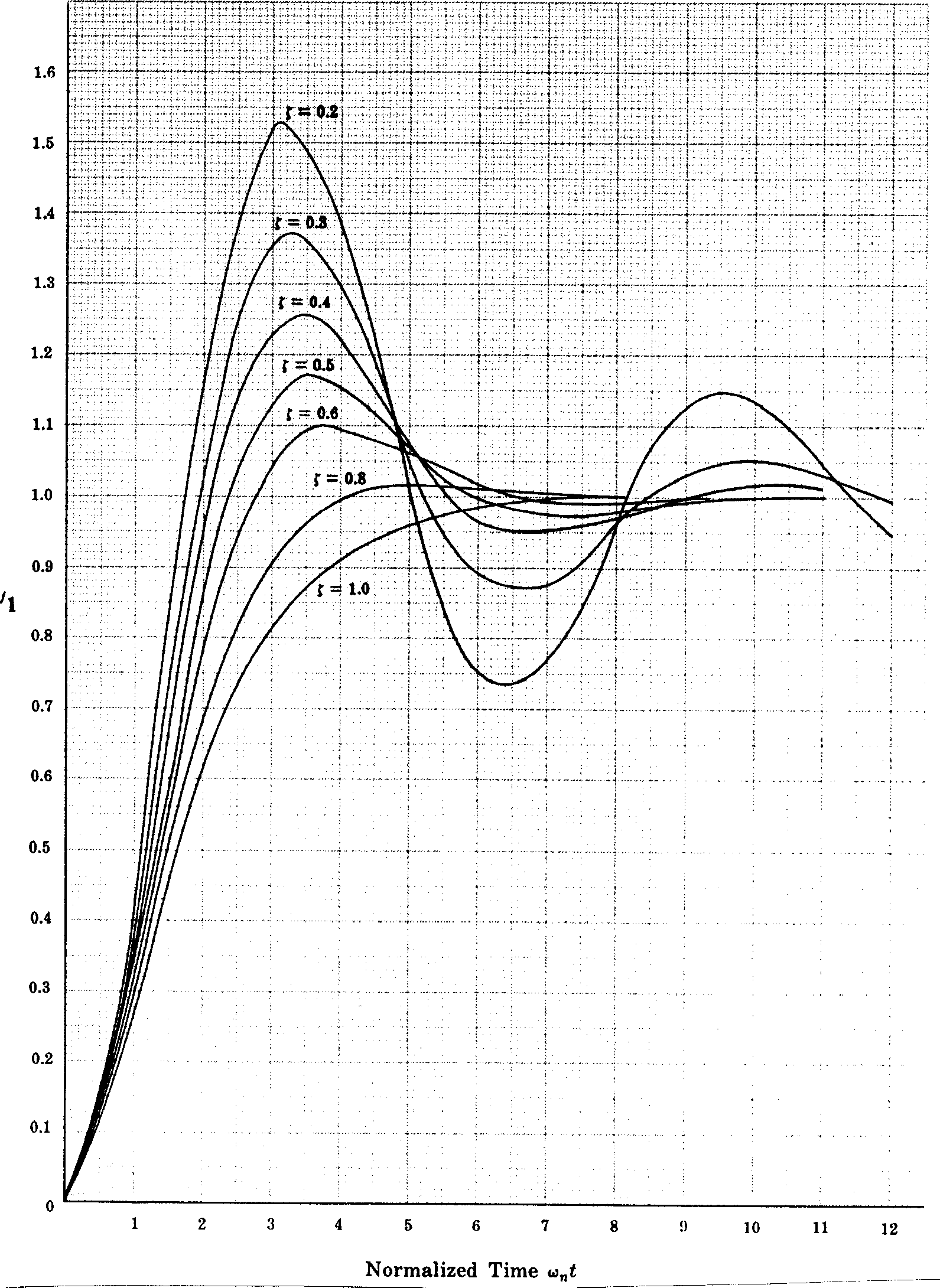
Figure 15 Unit step response vs normalised time \(\omega_n t\) for various values of \(\zeta\) (2nd order)
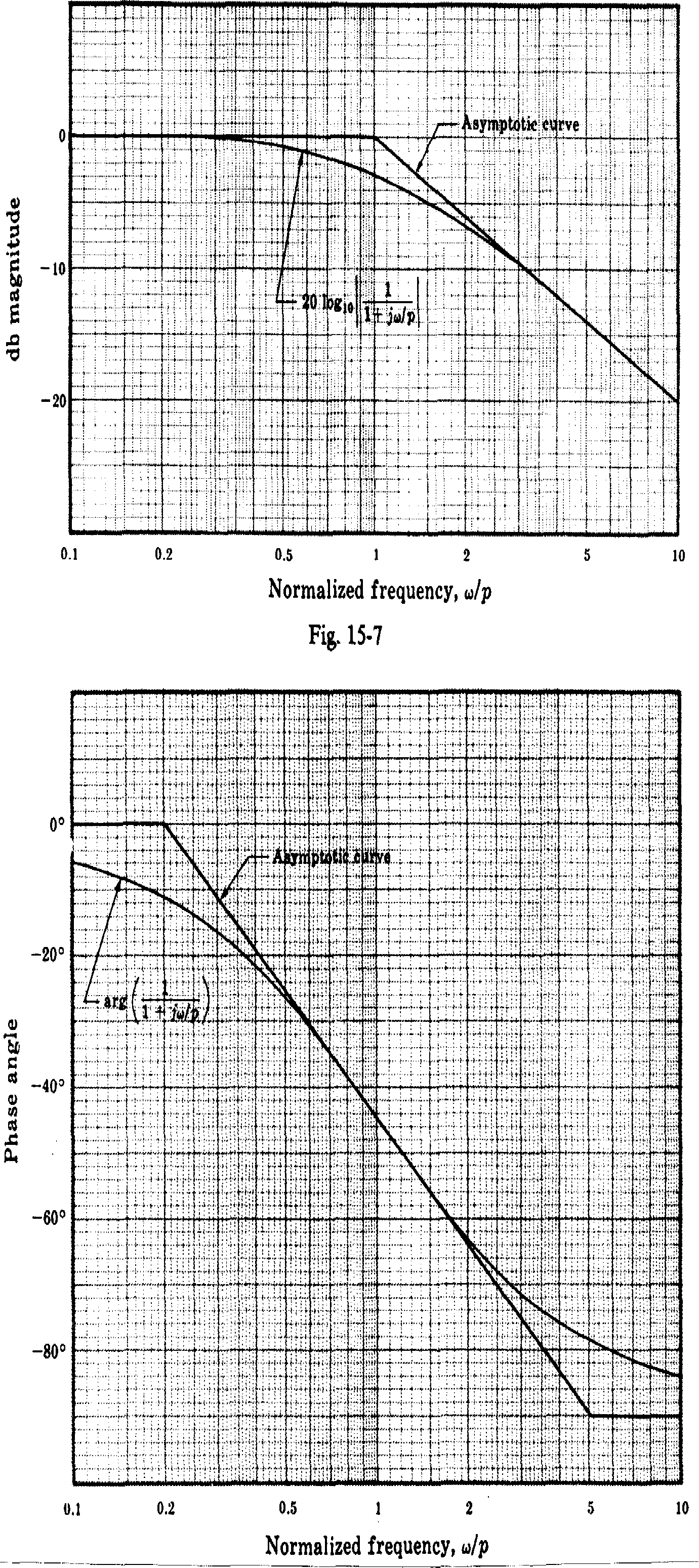
Figure 16 Bode diagram of a first order pole plotted against normalised frequency \(\omega/p\)
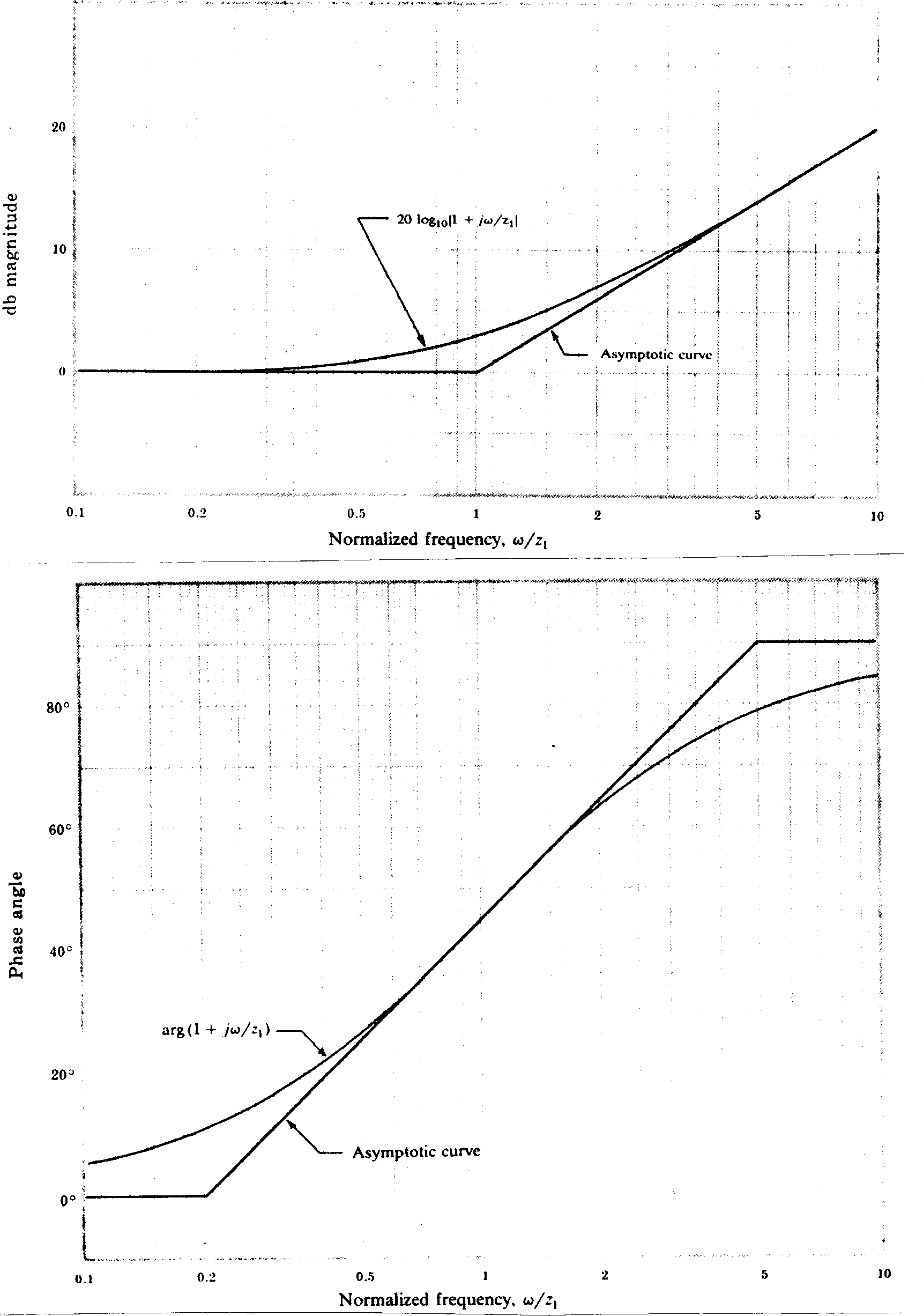
Figure 17 Bode diagram of a first order zero plotted against normalised frequency \(\omega/z\)
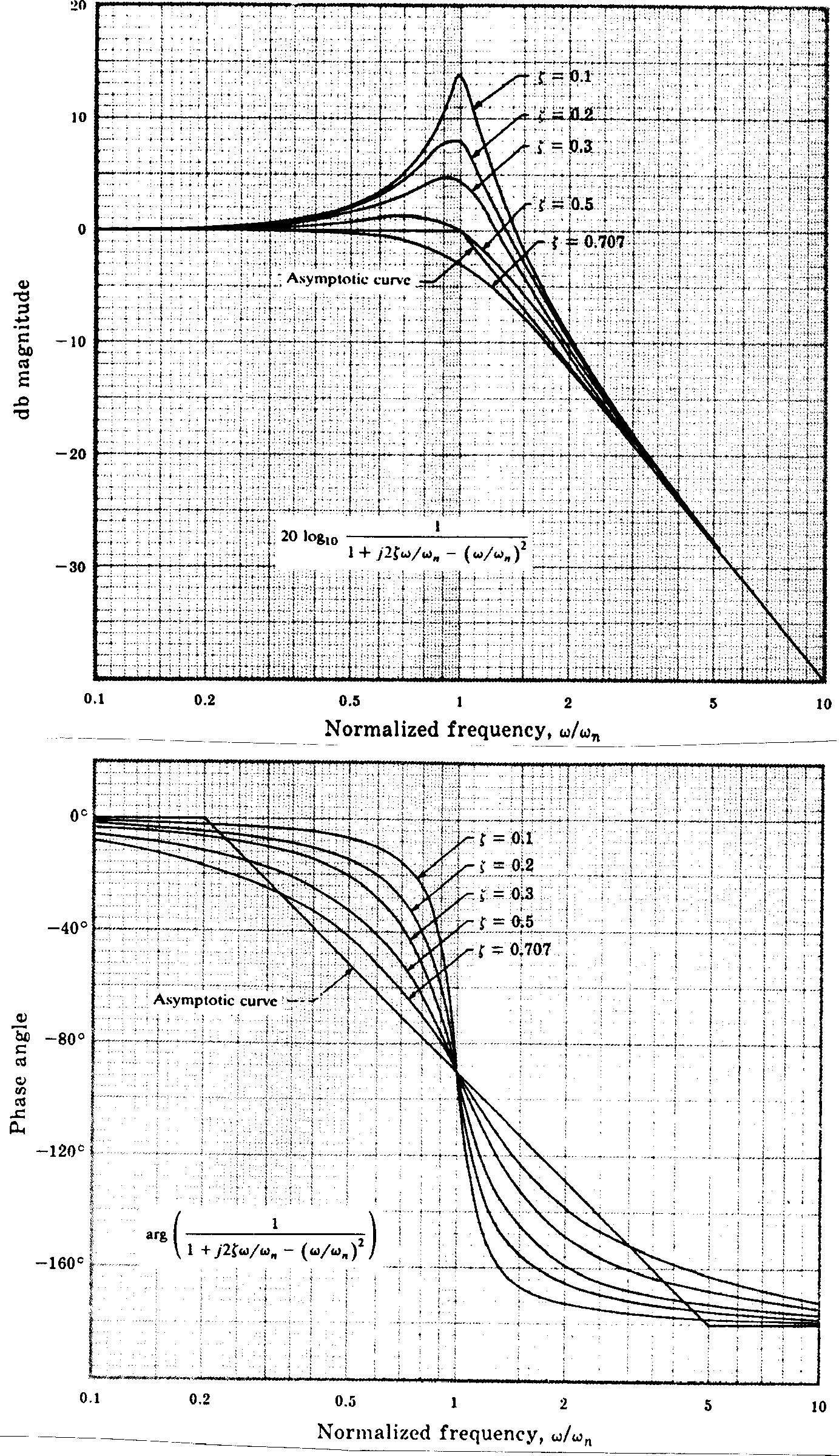
Figure 18 Bode diagram of a second order complex pair of poles plotted against normalised frequency \(\omega/\omega_n\) for various values of \(\zeta\)
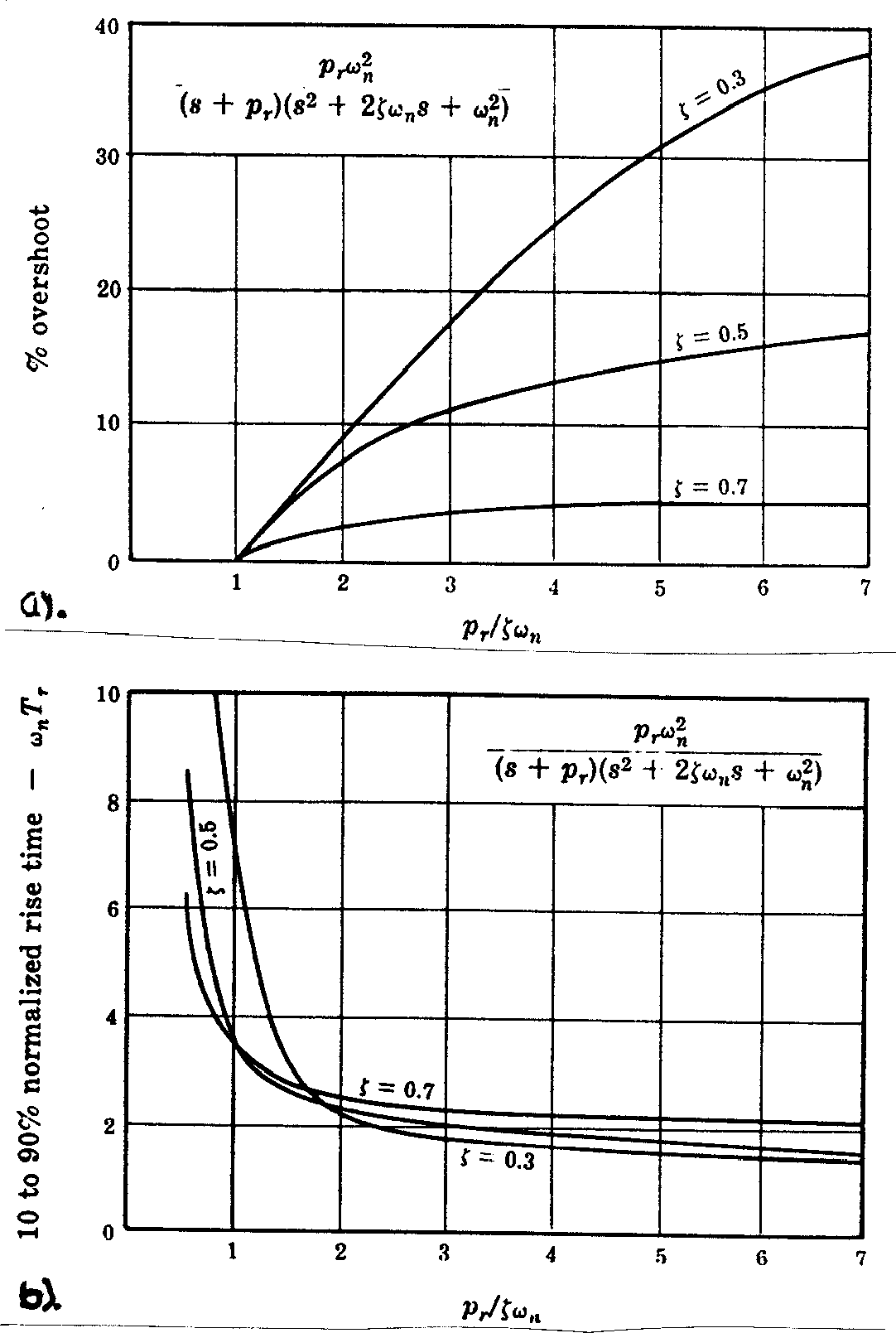
Figure 19 Effect of an extra pole at \(s = -p_r\) on a second order system
a) % overshoot \(M_P\) vs \(p_r/\zeta \omega_n\)
b) normalised rise time \(\omega_n t_r\) vs \(p_r/\zeta \omega_n\)
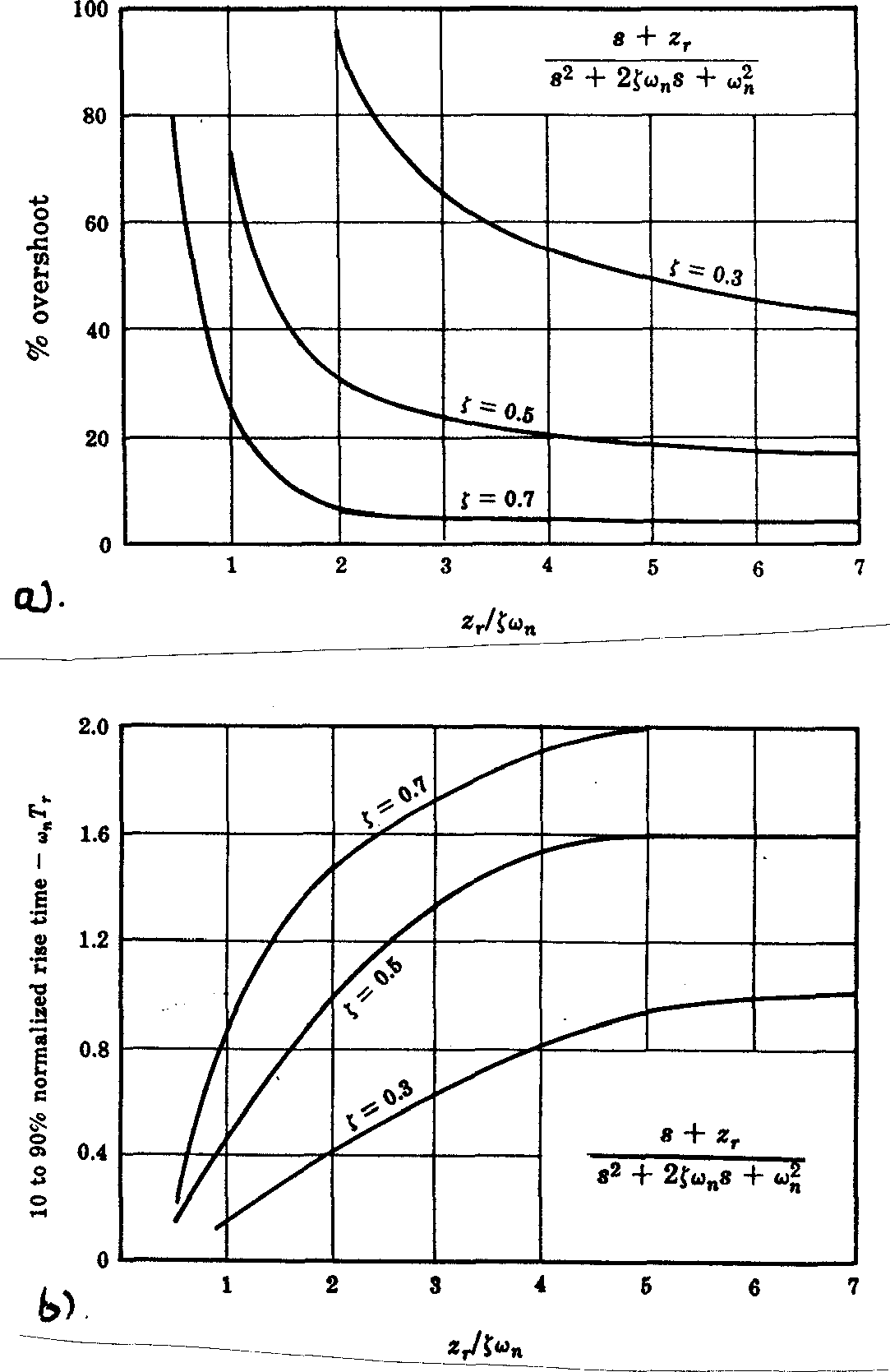
Figure 20 Effect of an extra zero at \(s = -z_r\) on a second order system
a) % overshoot \(M_P\) vs \(z_r/\zeta \omega_n\)
b) normalised rise time \(\omega_n t_r\) vs \(z_r/\zeta \omega_n\)
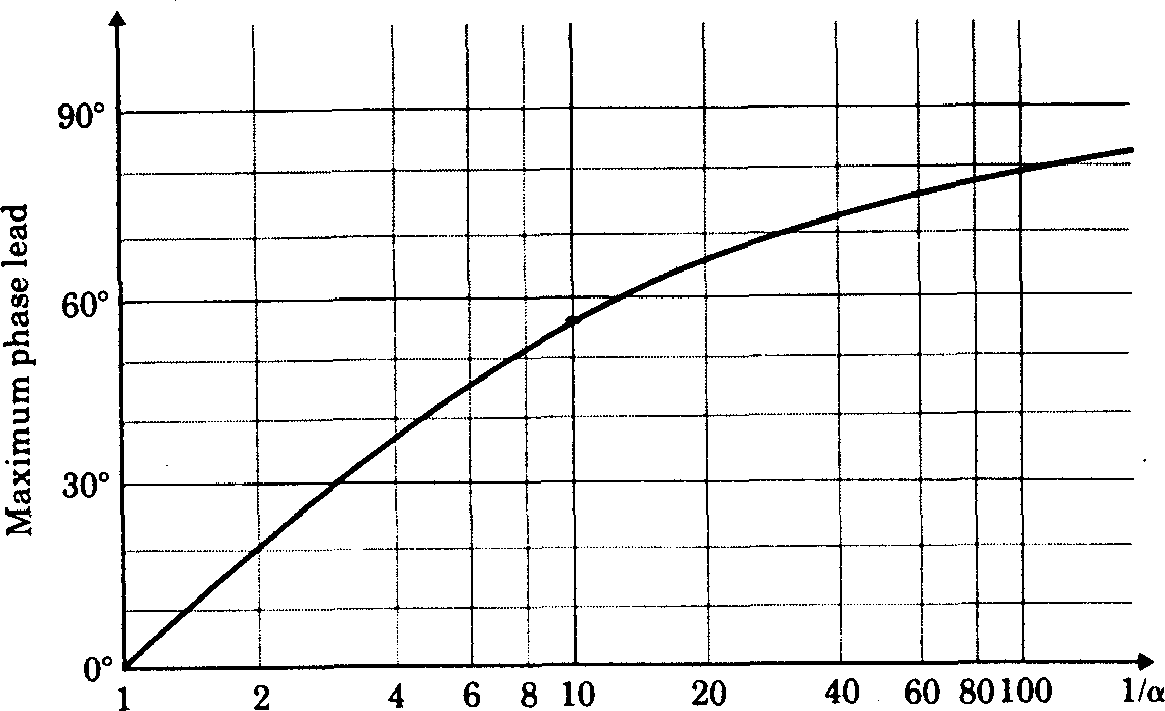
Figure 21 Maximum phase lead v \(\alpha\) for a phase-lead compensator
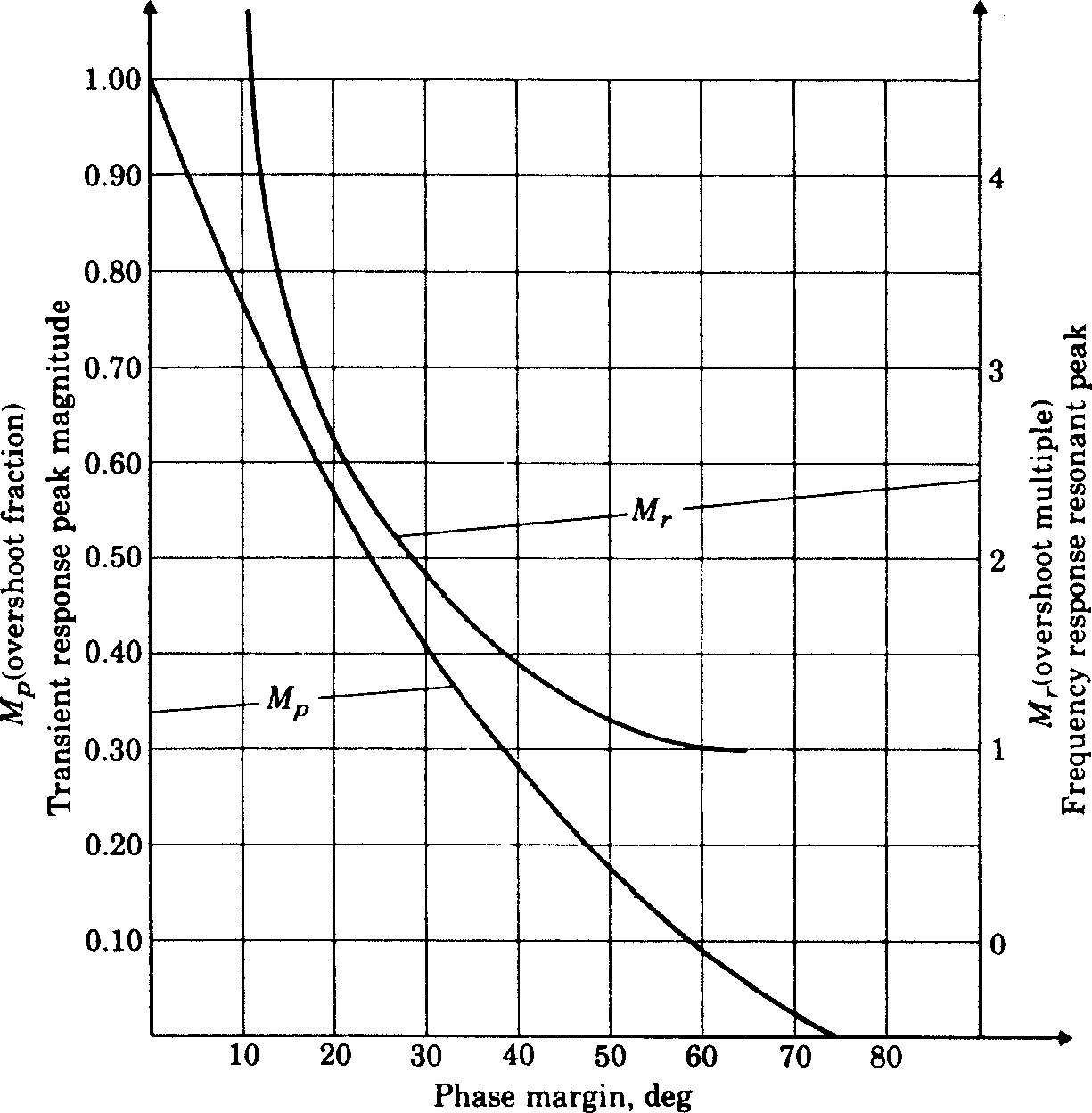
Figure 22 Transient response overshoot \(M_P\) and frequency response resonant peak vs phase margin for a second order system (note \(M_r = M_\max\))